 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocial Learning Strategies for Evolved Virtual Soft Robots
Apr 14, 2026Optimizing the body and brain of a robot is a coupled challenge: the morphology determines what control strategies are effective, while the control parameters influence how well the morphology performs. This joint optimization can be done through nested loops of evolutionary and learning processes, where the control parameters of each robot are learned independently. However, the control parameters learned by one robot may contain valuable information for others. Thus, we introduce a social learning approach in which robots can exploit optimized parameters from their peers to accelerate their own brain optimization. Within this framework, we systematically investigate how the selection of teachers, deciding which and how many robots to learn from, affects performance, experimenting with virtual soft robots in four tasks and environments. In particular, we study the effect of inheriting experience from morphologically similar robots due to the tightly coupled body and brain in robot optimization. Our results confirm the effectiveness of building on others' experience, as social learning clearly outperforms learning from scratch under equivalent computational budgets. In addition, while the optimal teacher selection strategy remains open, our findings suggest that incorporating knowledge from multiple teachers can yield more consistent and robust improvements.
Interactive LLM-assisted Curriculum Learning for Multi-Task Evolutionary Policy Search
Feb 11, 2026Multi-task policy search is a challenging problem because policies are required to generalize beyond training cases. Curriculum learning has proven to be effective in this setting, as it introduces complexity progressively. However, designing effective curricula is labor-intensive and requires extensive domain expertise. LLM-based curriculum generation has only recently emerged as a potential solution, but was limited to operate in static, offline modes without leveraging real-time feedback from the optimizer. Here we propose an interactive LLM-assisted framework for online curriculum generation, where the LLM adaptively designs training cases based on real-time feedback from the evolutionary optimization process. We investigate how different feedback modalities, ranging from numeric metrics alone to combinations with plots and behavior visualizations, influence the LLM ability to generate meaningful curricula. Through a 2D robot navigation case study, tackled with genetic programming as optimizer, we evaluate our approach against static LLM-generated curricula and expert-designed baselines. We show that interactive curriculum generation outperforms static approaches, with multimodal feedback incorporating both progression plots and behavior visualizations yielding performance competitive with expert-designed curricula. This work contributes to understanding how LLMs can serve as interactive curriculum designers for embodied AI systems, with potential extensions to broader evolutionary robotics applications.
Collective control of modular soft robots via embodied Spiking Neural Cellular Automata
Apr 05, 2022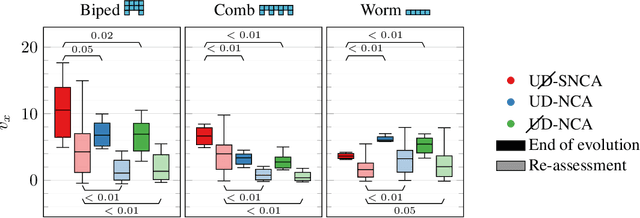
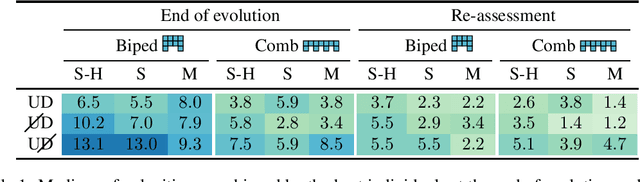
Voxel-based Soft Robots (VSRs) are a form of modular soft robots, composed of several deformable cubes, i.e., voxels. Each VSR is thus an ensemble of simple agents, namely the voxels, which must cooperate to give rise to the overall VSR behavior. Within this paradigm, collective intelligence plays a key role in enabling the emerge of coordination, as each voxel is independently controlled, exploiting only the local sensory information together with some knowledge passed from its direct neighbors (distributed or collective control). In this work, we propose a novel form of collective control, influenced by Neural Cellular Automata (NCA) and based on the bio-inspired Spiking Neural Networks: the embodied Spiking NCA (SNCA). We experiment with different variants of SNCA, and find them to be competitive with the state-of-the-art distributed controllers for the task of locomotion. In addition, our findings show significant improvement with respect to the baseline in terms of adaptability to unforeseen environmental changes, which could be a determining factor for physical practicability of VSRs.