 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovery of interaction and diffusion kernels in particle-to-mean-field multi-agent systems
Mar 16, 2026We propose a data-driven framework to learn interaction kernels in stochastic multi-agent systems. Our approach aims at identifying the functional form of nonlocal interaction and diffusion terms directly from trajectory data, without any a priori knowledge of the underlying interaction structure. Starting from a discrete stochastic binary-interaction model, we formulate the inverse problem as a sequence of sparse regression tasks in structured finite-dimensional spaces spanned by compactly supported basis functions, such as piecewise linear polynomials. In particular, we assume that pairwise interactions between agents are not directly observed and that only limited trajectory data are available. To address these challenges, we propose two complementary identification strategies. The first based on random-batch sampling, which compensates for latent interactions while preserving the statistical structure of the full dynamics in expectation. The second based on a mean-field approximation, where the empirical particle density reconstructed from the data defines a continuous nonlocal regression problem. Numerical experiments demonstrate the effectiveness and robustness of the proposed framework, showing accurate reconstruction of both interaction and diffusion kernels even from partially observed. The method is validated on benchmark models, including bounded-confidence and attraction-repulsion dynamics, where the two proposed strategies achieve comparable levels of accuracy.
Data/moment-driven approaches for fast predictive control of collective dynamics
Feb 23, 2024



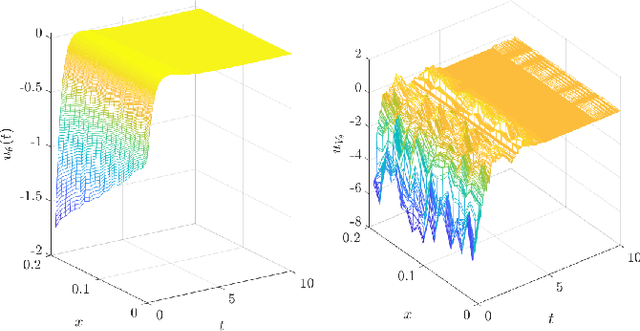
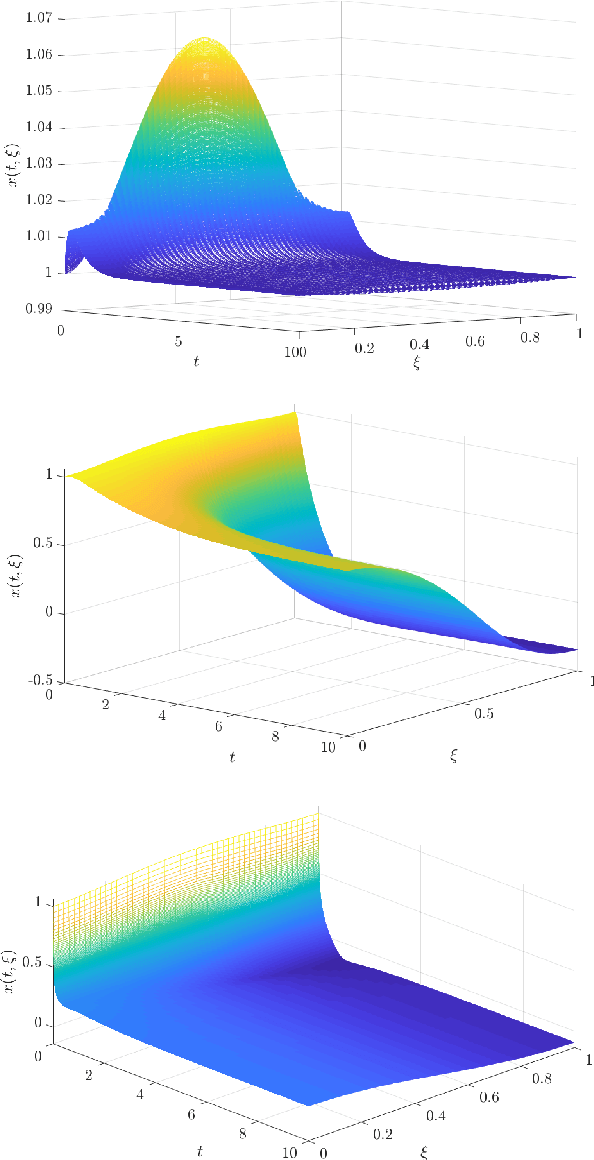
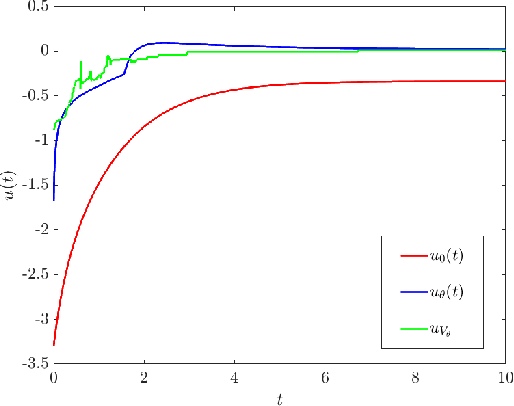
Feedback control synthesis for large-scale particle systems is reviewed in the framework of model predictive control (MPC). The high-dimensional character of collective dynamics hampers the performance of traditional MPC algorithms based on fast online dynamic optimization at every time step. Two alternatives to MPC are proposed. First, the use of supervised learning techniques for the offline approximation of optimal feedback laws is discussed. Then, a procedure based on sequential linearization of the dynamics based on macroscopic quantities of the particle ensemble is reviewed. Both approaches circumvent the online solution of optimal control problems enabling fast, real-time, feedback synthesis for large-scale particle systems. Numerical experiments assess the performance of the proposed algorithms.
Gradient-augmented Supervised Learning of Optimal Feedback Laws Using State-dependent Riccati Equations
Mar 06, 2021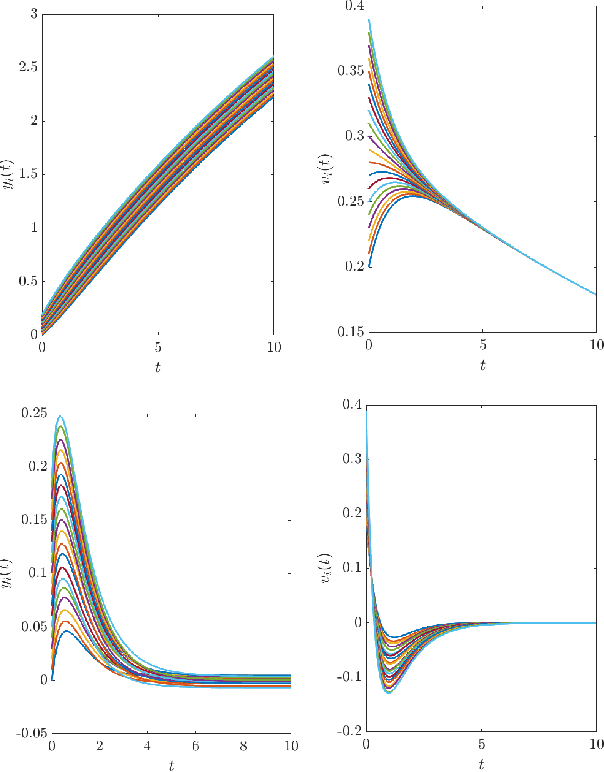
A supervised learning approach for the solution of large-scale nonlinear stabilization problems is presented. A stabilizing feedback law is trained from a dataset generated from State-dependent Riccati Equation solves. The training phase is enriched by the use gradient information in the loss function, which is weighted through the use of hyperparameters. High-dimensional nonlinear stabilization tests demonstrate that real-time sequential large-scale Algebraic Riccati Equation solves can be substituted by a suitably trained feedforward neural network.