 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKornia-rs: A Low-Level 3D Computer Vision Library In Rust
May 18, 2025We present \textit{kornia-rs}, a high-performance 3D computer vision library written entirely in native Rust, designed for safety-critical and real-time applications. Unlike C++-based libraries like OpenCV or wrapper-based solutions like OpenCV-Rust, \textit{kornia-rs} is built from the ground up to leverage Rust's ownership model and type system for memory and thread safety. \textit{kornia-rs} adopts a statically-typed tensor system and a modular set of crates, providing efficient image I/O, image processing and 3D operations. To aid cross-platform compatibility, \textit{kornia-rs} offers Python bindings, enabling seamless and efficient integration with Rust code. Empirical results show that \textit{kornia-rs} achieves a 3~ 5 times speedup in image transformation tasks over native Rust alternatives, while offering comparable performance to C++ wrapper-based libraries. In addition to 2D vision capabilities, \textit{kornia-rs} addresses a significant gap in the Rust ecosystem by providing a set of 3D computer vision operators. This paper presents the architecture and performance characteristics of \textit{kornia-rs}, demonstrating its effectiveness in real-world computer vision applications.
Kornia: an Open Source Differentiable Computer Vision Library for PyTorch
Oct 09, 2019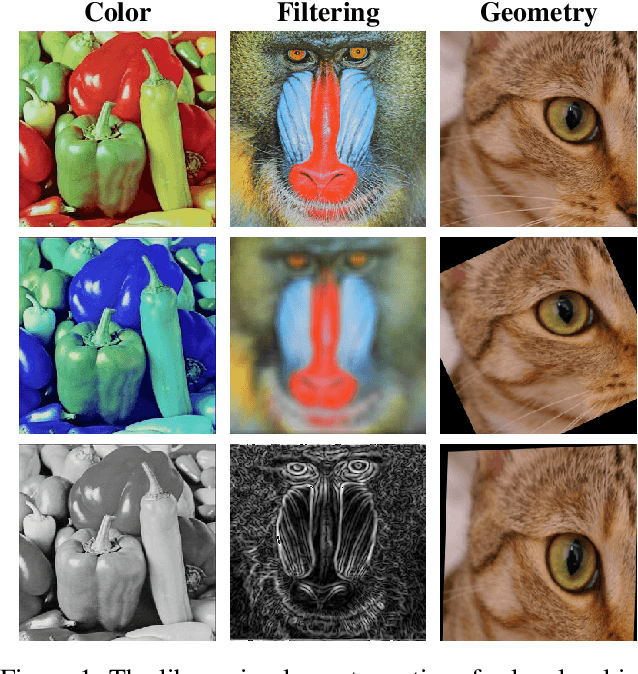

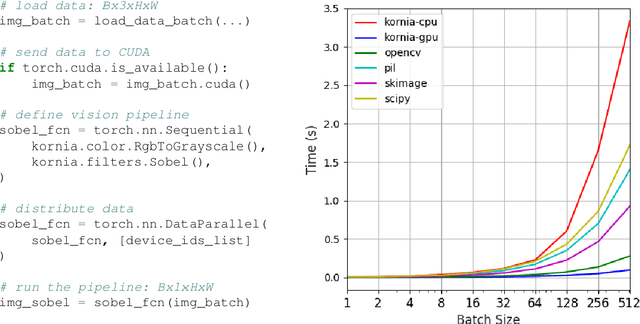
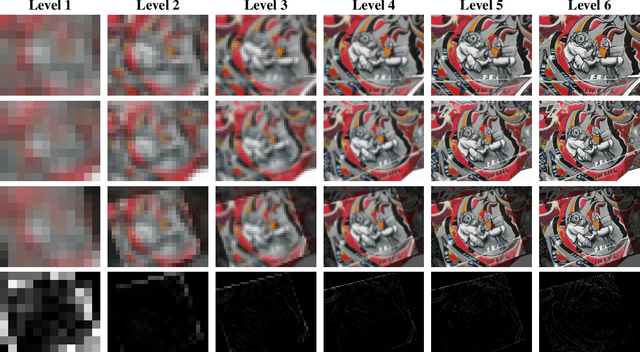
This work presents Kornia -- an open source computer vision library which consists of a set of differentiable routines and modules to solve generic computer vision problems. The package uses PyTorch as its main backend both for efficiency and to take advantage of the reverse-mode auto-differentiation to define and compute the gradient of complex functions. Inspired by OpenCV, Kornia is composed of a set of modules containing operators that can be inserted inside neural networks to train models to perform image transformations, camera calibration, epipolar geometry, and low level image processing techniques, such as filtering and edge detection that operate directly on high dimensional tensor representations. Examples of classical vision problems implemented using our framework are provided including a benchmark comparing to existing vision libraries.