 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajMamba: An Ego-Motion-Guided Mamba Model for Pedestrian Trajectory Prediction from an Egocentric Perspective
Mar 16, 2026Future trajectory prediction of a tracked pedestrian from an egocentric perspective is a key task in areas such as autonomous driving and robot navigation. The challenge of this task lies in the complex dynamic relative motion between the ego-camera and the tracked pedestrian. To address this challenge, we propose an ego-motion-guided trajectory prediction network based on the Mamba model. Firstly, two Mamba models are used as encoders to extract pedestrian motion and ego-motion features from pedestrian movement and ego-vehicle movement, respectively. Then, an ego-motion guided Mamba decoder that explicitly models the relative motion between the pedestrian and the vehicle by integrating pedestrian motion features as historical context with ego-motion features as guiding cues to capture decoded features. Finally, the future trajectory is generated from the decoded features corresponding to the future timestamps. Extensive experiments demonstrate the effectiveness of the proposed model, which achieves state-of-the-art performance on the PIE and JAAD datasets.
SRA-LSTM: Social Relationship Attention LSTM for Human Trajectory Prediction
Mar 31, 2021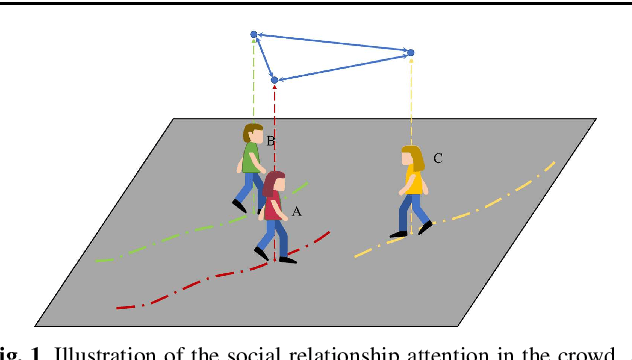
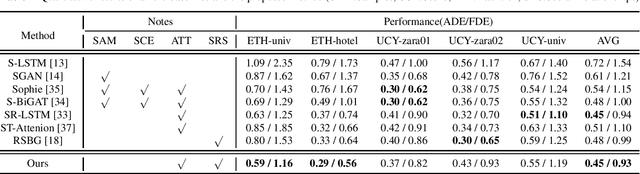
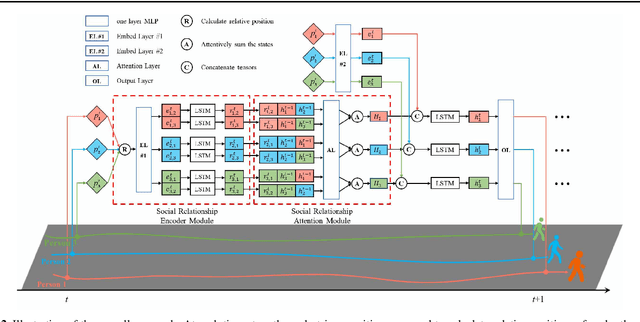
Pedestrian trajectory prediction for surveillance video is one of the important research topics in the field of computer vision and a key technology of intelligent surveillance systems. Social relationship among pedestrians is a key factor influencing pedestrian walking patterns but was mostly ignored in the literature. Pedestrians with different social relationships play different roles in the motion decision of target pedestrian. Motivated by this idea, we propose a Social Relationship Attention LSTM (SRA-LSTM) model to predict future trajectories. We design a social relationship encoder to obtain the representation of their social relationship through the relative position between each pair of pedestrians. Afterwards, the social relationship feature and latent movements are adopted to acquire the social relationship attention of this pair of pedestrians. Social interaction modeling is achieved by utilizing social relationship attention to aggregate movement information from neighbor pedestrians. Experimental results on two public walking pedestrian video datasets (ETH and UCY), our model achieves superior performance compared with state-of-the-art methods. Contrast experiments with other attention methods also demonstrate the effectiveness of social relationship attention.