 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBandwidth-adaptive Cloud-Assisted 360-Degree 3D Perception for Autonomous Vehicles
Feb 27, 2026A key challenge for autonomous driving lies in maintaining real-time situational awareness regarding surrounding obstacles under strict latency constraints. The high processing requirements coupled with limited onboard computational resources can cause delay issues, particularly in complex urban settings. To address this, we propose leveraging Vehicle-to-Everything (V2X) communication to partially offload processing to the cloud, where compute resources are abundant, thus reducing overall latency. Our approach utilizes transformer-based models to fuse multi-camera sensor data into a comprehensive Bird's-Eye View (BEV) representation, enabling accurate 360-degree 3D object detection. The computation is dynamically split between the vehicle and the cloud based on the number of layers processed locally and the quantization level of the features. To further reduce network load, we apply feature vector clipping and compression prior to transmission. In a real-world experimental evaluation, our hybrid strategy achieved a 72 \% reduction in end-to-end latency compared to a traditional onboard solution. To adapt to fluctuating network conditions, we introduce a dynamic optimization algorithm that selects the split point and quantization level to maximize detection accuracy while satisfying real-time latency constraints. Trace-based evaluation under realistic bandwidth variability shows that this adaptive approach improves accuracy by up to 20 \% over static parameterization with the same latency performance.
Editing Implicit and Explicit Representations of Radiance Fields: A Survey
Dec 23, 2024Neural Radiance Fields (NeRF) revolutionized novel view synthesis in recent years by offering a new volumetric representation, which is compact and provides high-quality image rendering. However, the methods to edit those radiance fields developed slower than the many improvements to other aspects of NeRF. With the recent development of alternative radiance field-based representations inspired by NeRF as well as the worldwide rise in popularity of text-to-image models, many new opportunities and strategies have emerged to provide radiance field editing. In this paper, we deliver a comprehensive survey of the different editing methods present in the literature for NeRF and other similar radiance field representations. We propose a new taxonomy for classifying existing works based on their editing methodologies, review pioneering models, reflect on current and potential new applications of radiance field editing, and compare state-of-the-art approaches in terms of editing options and performance.
DENSER: 3D Gaussians Splatting for Scene Reconstruction of Dynamic Urban Environments
Sep 16, 2024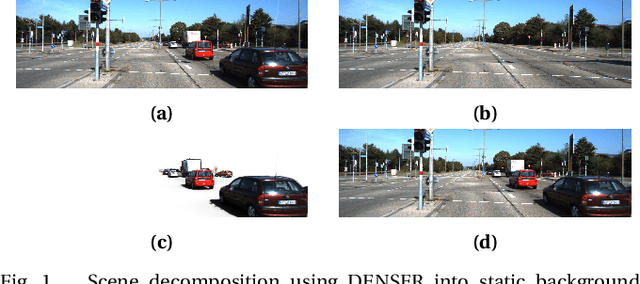
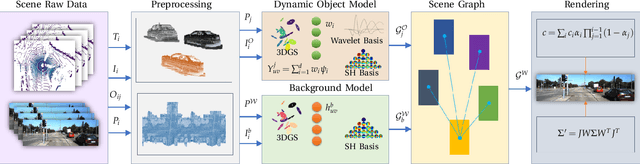
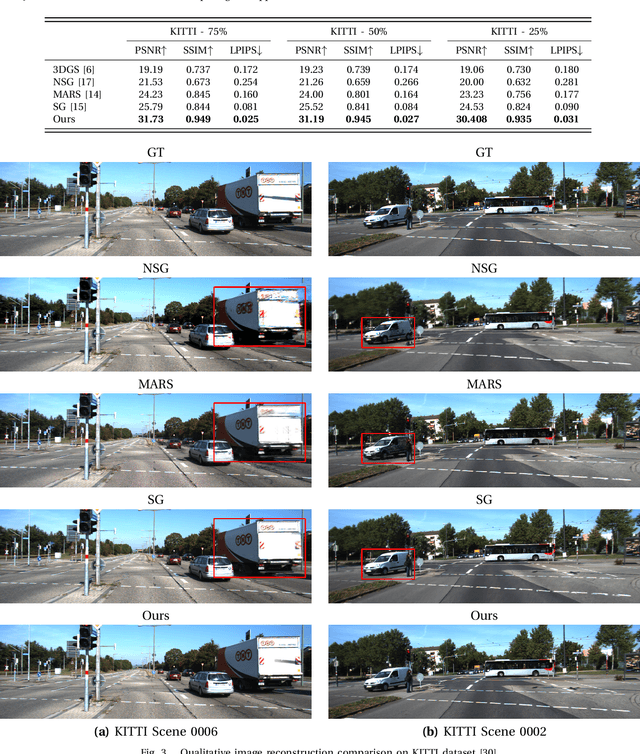
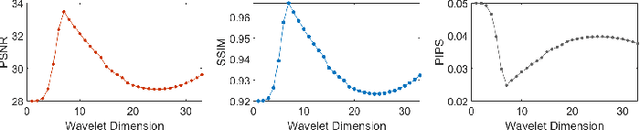
This paper presents DENSER, an efficient and effective approach leveraging 3D Gaussian splatting (3DGS) for the reconstruction of dynamic urban environments. While several methods for photorealistic scene representations, both implicitly using neural radiance fields (NeRF) and explicitly using 3DGS have shown promising results in scene reconstruction of relatively complex dynamic scenes, modeling the dynamic appearance of foreground objects tend to be challenging, limiting the applicability of these methods to capture subtleties and details of the scenes, especially far dynamic objects. To this end, we propose DENSER, a framework that significantly enhances the representation of dynamic objects and accurately models the appearance of dynamic objects in the driving scene. Instead of directly using Spherical Harmonics (SH) to model the appearance of dynamic objects, we introduce and integrate a new method aiming at dynamically estimating SH bases using wavelets, resulting in better representation of dynamic objects appearance in both space and time. Besides object appearance, DENSER enhances object shape representation through densification of its point cloud across multiple scene frames, resulting in faster convergence of model training. Extensive evaluations on KITTI dataset show that the proposed approach significantly outperforms state-of-the-art methods by a wide margin. Source codes and models will be uploaded to this repository https://github.com/sntubix/denser
RoboCar: A Rapidly Deployable Open-Source Platform for Autonomous Driving Research
May 06, 2024This paper introduces RoboCar, an open-source research platform for autonomous driving developed at the University of Luxembourg. RoboCar provides a modular, cost-effective framework for the development of experimental Autonomous Driving Systems (ADS), utilizing the 2018 KIA Soul EV. The platform integrates a robust hardware and software architecture that aligns with the vehicle's existing systems, minimizing the need for extensive modifications. It supports various autonomous driving functions and has undergone real-world testing on public roads in Luxembourg City. This paper outlines the platform's architecture, integration challenges, and initial test results, offering insights into its application in advancing autonomous driving research. RoboCar is available to anyone at https://github.com/sntubix/robocar and is released under an open-source MIT license.
Towards a Safe Real-Time Motion Planning Framework for Autonomous Driving Systems: An MPPI Approach
Aug 03, 2023Planning safe trajectories in Autonomous Driving Systems (ADS) is a complex problem to solve in real-time. The main challenge to solve this problem arises from the various conditions and constraints imposed by road geometry, semantics and traffic rules, as well as the presence of dynamic agents. Recently, Model Predictive Path Integral (MPPI) has shown to be an effective framework for optimal motion planning and control in robot navigation in unstructured and highly uncertain environments. In this paper, we formulate the motion planning problem in ADS as a nonlinear stochastic dynamic optimization problem that can be solved using an MPPI strategy. The main technical contribution of this work is a method to handle obstacles within the MPPI formulation safely. In this method, obstacles are approximated by circles that can be easily integrated into the MPPI cost formulation while considering safety margins. The proposed MPPI framework has been efficiently implemented in our autonomous vehicle and experimentally validated using three different primitive scenarios. Experimental results show that generated trajectories are safe, feasible and perfectly achieve the planning objective. The video results as well as the open-source implementation are available at: https://gitlab.uni.lu/360lab-public/mppi
FastCycle: A Message Sharing Framework for Modular Automated Driving Systems
Nov 28, 2022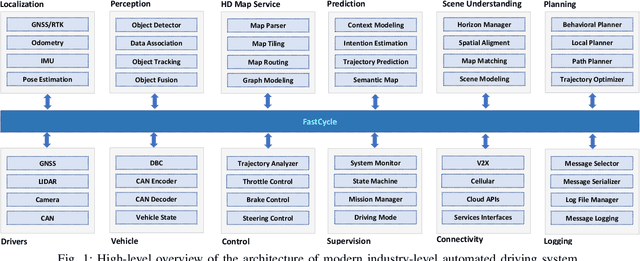
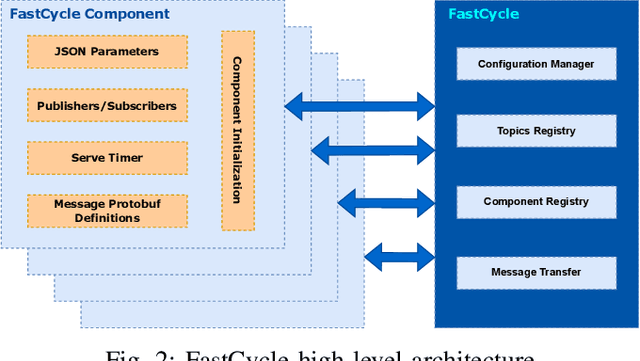
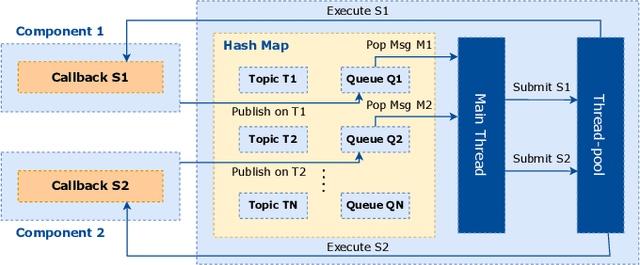
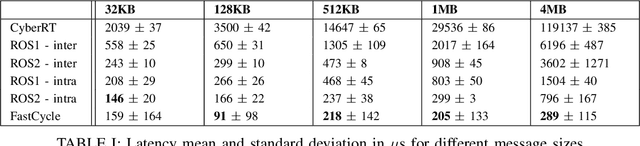
Automated Driving Systems (ADS) have rapidly evolved in recent years and their architecture becomes sophisticated. Ensuring robustness, reliability and safety of performance is particularly important. The main challenge in building an ADS is the ability to meet certain stringent performance requirements in terms of both making safe operational decisions and finishing processing in real-time. Middlewares play a crucial role to handle these requirements in ADS. The way middlewares share data between the different system components has a direct impact on the overall performance, particularly the latency overhead. To this end, this paper presents FastCycle as a lightweight multi-threaded zero-copy messaging broker to meet the requirements of a high fidelity ADS in terms of modularity, real-time performance and security. We discuss the architecture and the main features of the proposed framework. Evaluation of the proposed framework based on standard metrics in comparison with popular middlewares used in robotics and automated driving shows the improved performance of our framework. The implementation of FastCycle and the associated comparisons with other frameworks are open sourced.