 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCylindrical Mechanical Projector for Omnidirectional Fringe Projection Profilometry
Mar 11, 2026The demand for 360-degree 3D reconstruction has significantly increased in recent years across various domains such as the metaverse and 3D telecommunication. Accordingly, the importance of precise and wide-area 3D sensing technology has become emphasized. While the digital fringe projection method has been widely used due to its high accuracy and implementation flexibility, it suffers from fundamental limitations such as unidirectional projection and a restricted available light spectrum. To address these issues, this paper proposes a novel 3D reconstruction method based on a cylindrical mechanical projector. The proposed method consists of a rotational stage and a cylindrical pattern generator with ON/OFF slots at two distinct intervals, enabling omnidirectional projection of multi-frequency phase-shifted fringe patterns. By applying a multi-wavelength unwrapping algorithm and a quasi-calibration technique, the system achieves high-accuracy 3D reconstruction using only a single camera. Experimental results, supported by repeatability and reproducibility analyses together with a measurement uncertainty evaluation, confirm reliable measurement performance and practical feasibility for omnidirectional 3D reconstruction. The expanded uncertainty of the reconstructed depth was evaluated as 0.215 mm.
StablePrompt: Automatic Prompt Tuning using Reinforcement Learning for Large Language Models
Oct 10, 2024



Finding appropriate prompts for the specific task has become an important issue as the usage of Large Language Models (LLM) has expanded. Reinforcement Learning (RL) is widely used for prompt tuning, but its inherent instability and environmental dependency make it difficult to use in practice. In this paper, we propose StablePrompt, which strikes a balance between training stability and search space, mitigating the instability of RL and producing high-performance prompts. We formulate prompt tuning as an online RL problem between the agent and target LLM and introduce Adaptive Proximal Policy Optimization (APPO). APPO introduces an LLM anchor model to adaptively adjust the rate of policy updates. This allows for flexible prompt search while preserving the linguistic ability of the pre-trained LLM. StablePrompt outperforms previous methods on various tasks including text classification, question answering, and text generation. Our code can be found in github.
Team HYU ASML ROBOVOX SP Cup 2024 System Description
Jul 16, 2024



This report describes the submission of HYU ASML team to the IEEE Signal Processing Cup 2024 (SP Cup 2024). This challenge, titled "ROBOVOX: Far-Field Speaker Recognition by a Mobile Robot," focuses on speaker recognition using a mobile robot in noisy and reverberant conditions. Our solution combines the result of deep residual neural networks and time-delay neural network-based speaker embedding models. These models were trained on a diverse dataset that includes French speech. To account for the challenging evaluation environment characterized by high noise, reverberation, and short speech conditions, we focused on data augmentation and training speech duration for the speaker embedding model. Our submission achieved second place on the SP Cup 2024 public leaderboard, with a detection cost function of 0.5245 and an equal error rate of 6.46%.
Human Gist Processing Augments Deep Learning Breast Cancer Risk Assessment
Nov 28, 2019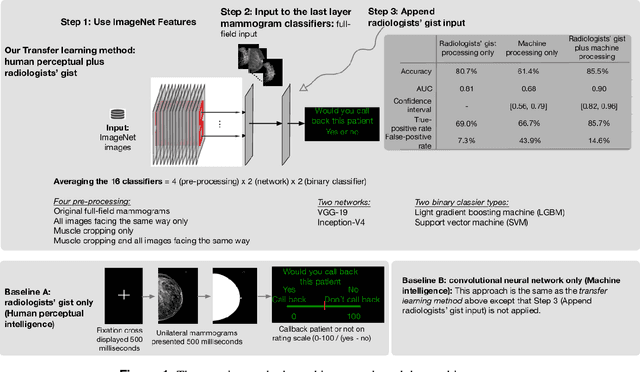
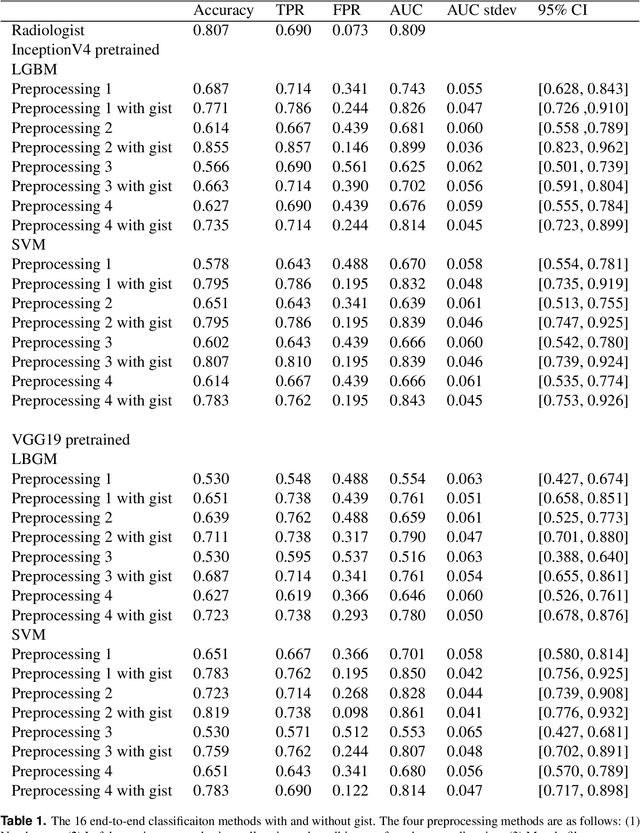
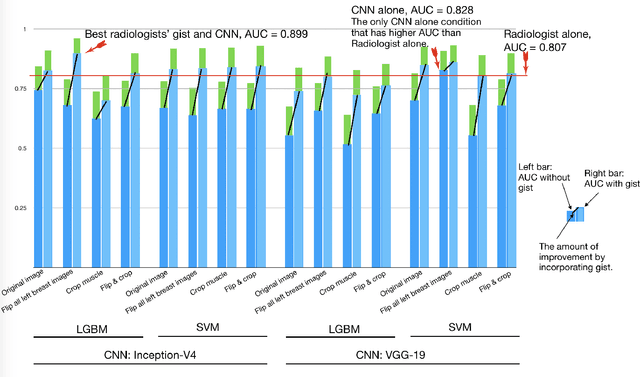
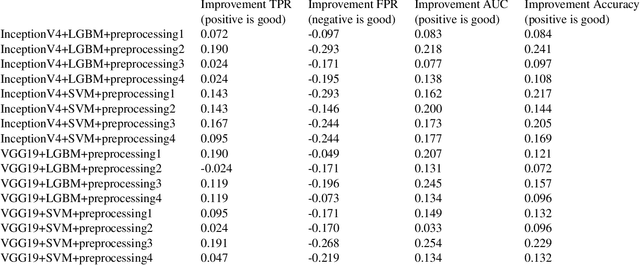
Radiologists can classify a mammogram as normal or abnormal at better than chance levels after less than a second's exposure to the images. In this work, we combine these radiologists' gist inputs into pre-trained machine learning models to validate that integrating gist with a CNN model can achieve an AUC (area under the curve) statistically significantly higher than either the gist perception of radiologists or the model without gist input.