 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFriction Estimation for In-Hand Planar Motion
Jul 09, 2025This paper presents a method for online estimation of contact properties during in-hand sliding manipulation with a parallel gripper. We estimate the static and Coulomb friction as well as the contact radius from tactile measurements of contact forces and sliding velocities. The method is validated in both simulation and real-world experiments. Furthermore, we propose a heuristic to deal with fast slip-stick dynamics which can adversely affect the estimation.
Perception, Control and Hardware for In-Hand Slip-Aware Object Manipulation with Parallel Grippers
Oct 25, 2024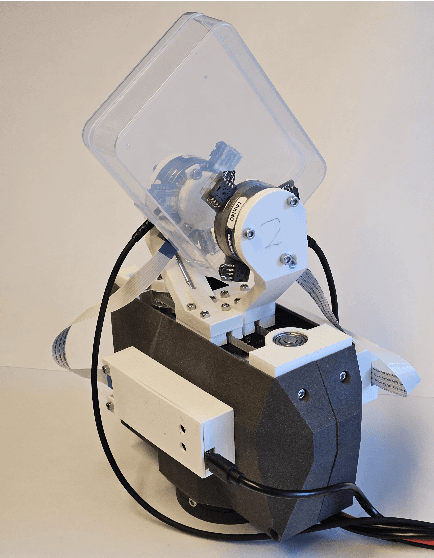

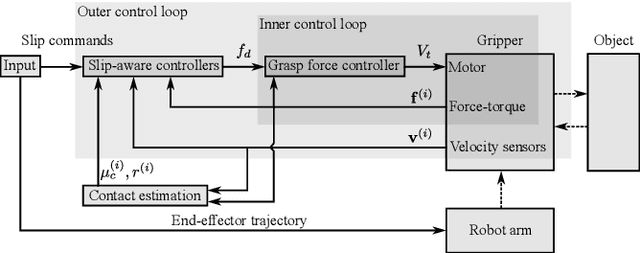
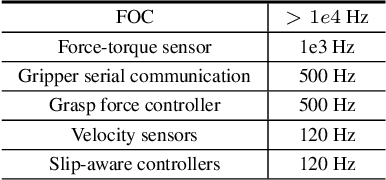
Dexterous in-hand manipulation offers significant potential to enhance robotic manipulator capabilities. This paper presents a comprehensive study on custom sensors and parallel gripper hardware specifically designed for in-hand slippage control. The gripper features rapid closed-loop, low-level force control, and is equipped with sensors capable of independently measuring contact forces and sliding velocities. Our system can quickly estimate essential object properties during pick-up using only in-hand sensing, without relying on prior object information. We introduce four distinct slippage controllers: gravity-assisted trajectory following for both rotational and linear slippage, a hinge controller that maintains the object's orientation while the gripper rotates, and a slip-avoidance controller. The system is mounted on a robot arm and validated through extensive experiments involving a diverse range of objects, demonstrating its novel capabilities.
Offline Goal-Conditioned Reinforcement Learning for Shape Control of Deformable Linear Objects
Mar 15, 2024Deformable objects present several challenges to the field of robotic manipulation. One of the tasks that best encapsulates the difficulties arising due to non-rigid behavior is shape control, which requires driving an object to a desired shape. While shape-servoing methods have been shown successful in contexts with approximately linear behavior, they can fail in tasks with more complex dynamics. We investigate an alternative approach, using offline RL to solve a planar shape control problem of a Deformable Linear Object (DLO). To evaluate the effect of material properties, two DLOs are tested namely a soft rope and an elastic cord. We frame this task as a goal-conditioned offline RL problem, and aim to learn to generalize to unseen goal shapes. Data collection and augmentation procedures are proposed to limit the amount of experimental data which needs to be collected with the real robot. We evaluate the amount of augmentation needed to achieve the best results, and test the effect of regularization through behavior cloning on the TD3+BC algorithm. Finally, we show that the proposed approach is able to outperform a shape-servoing baseline in a curvature inversion experiment.
Planar Friction Modelling with LuGre Dynamics and Limit Surfaces
Aug 02, 2023Contact surfaces in planar motion exhibit a coupling between tangential and rotational friction forces. This paper proposes planar friction models grounded in the LuGre model and limit surface theory. First, distributed planar extended state models are proposed and the Elasto-Plastic model is extended for multi-dimensional friction. Subsequently, we derive a reduced planar friction model, coupled with a pre-calculated limit surface, that offers reduced computational cost. The limit surface approximation through an ellipsoid is discussed. The properties of the planar friction models are assessed in various simulations, demonstrating that the reduced planar friction model achieves comparable performance to the distributed model while exhibiting ~80 times lower computational cost.