 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNARX Identification using Derivative-Based Regularized Neural Networks
Apr 12, 2022
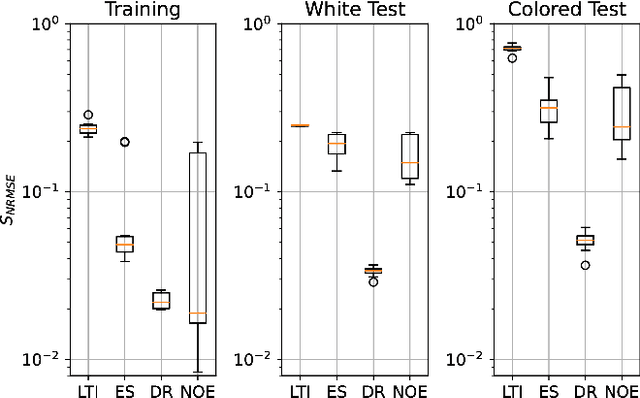
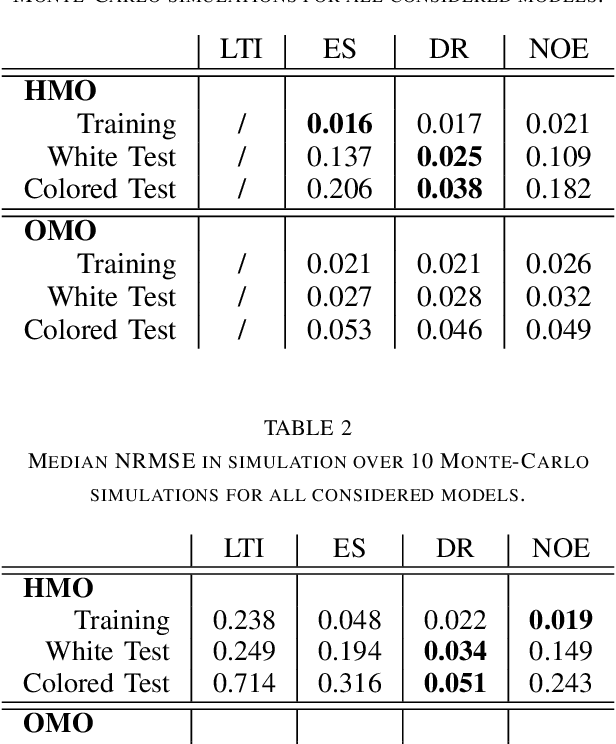
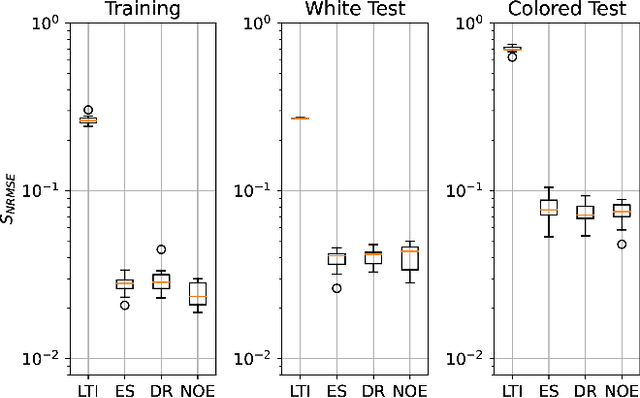
This work presents a novel regularization method for the identification of Nonlinear Autoregressive eXogenous (NARX) models. The regularization method promotes the exponential decay of the influence of past input samples on the current model output. This is done by penalizing the sensitivity (i.e. partial derivative) of the NARX model simulated output with respect to the past inputs. The effectiveness of the approach is demonstrated through a simulation example, where a neural network NARX model is identified with this novel method. Moreover, it is shown that the proposed regularization approach improves the model accuracy in terms of simulation error performance compared to that of other regularization methods and model classes.
Identification of the nonlinear steering dynamics of an autonomous vehicle
May 10, 2021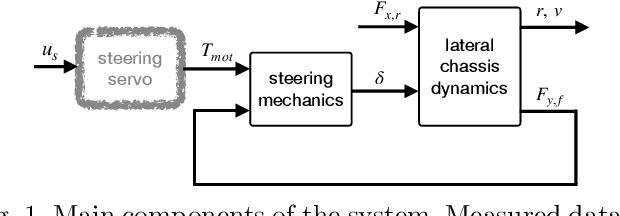

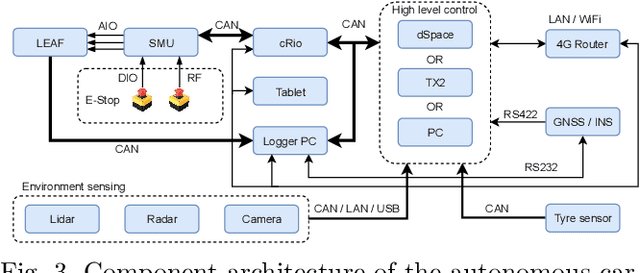
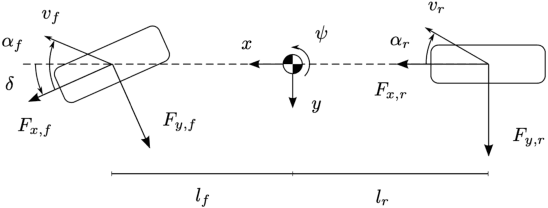
Automated driving applications require accurate vehicle specific models to precisely predict and control the motion dynamics. However, modern vehicles have a wide array of digital and mechatronic components that are difficult to model, manufactures do not disclose all details required for modelling and even existing models of subcomponents require coefficient estimation to match the specific characteristics of each vehicle and their change over time. Hence, it is attractive to use data-driven modelling to capture the relevant vehicle dynamics and synthesise model-based control solutions. In this paper, we address identification of the steering system of an autonomous car based on measured data. We show that the underlying dynamics are highly nonlinear and challenging to be captured, necessitating the use of data-driven methods that fuse the approximation capabilities of learning and the efficiency of dynamic system identification. We demonstrate that such a neural network based subspace-encoder method can successfully capture the underlying dynamics while other methods fall short to provide reliable results.