 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocation-Informed Interference Suppression Precoding Methods for Distributed Massive MIMO Systems
Nov 07, 2025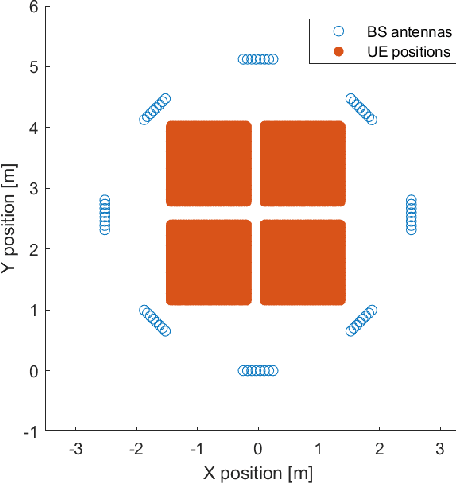
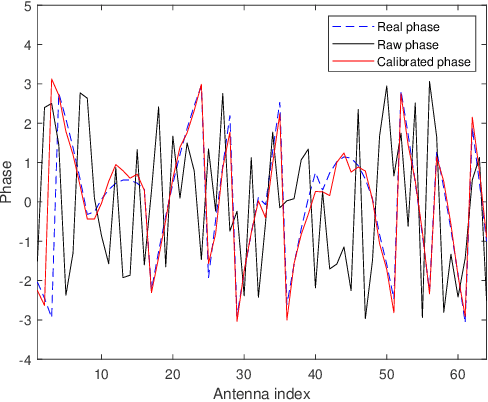
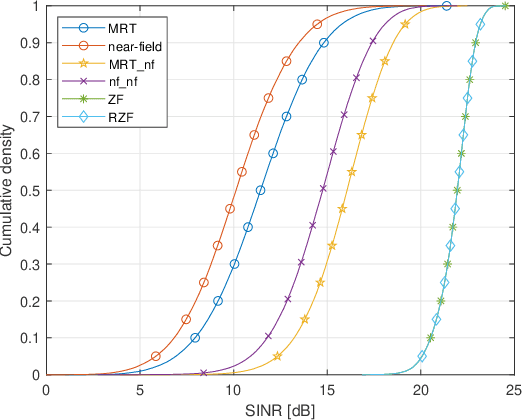
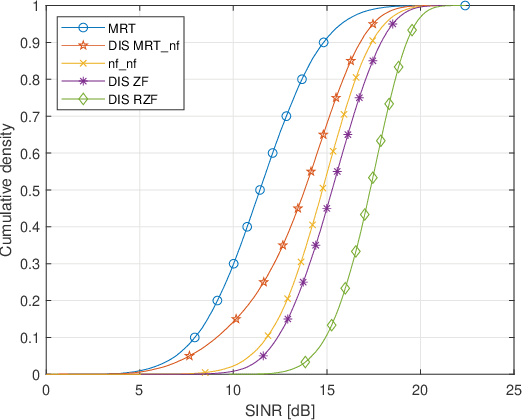
The evolution of mobile networks towards user-centric cell-free distributed Massive MIMO configurations requires the development of novel signal processing techniques. More specifically, digital precoding algorithms have to be designed or adopted to enable distributed operation. Future deployments are expected to improve coexistence between cellular generations, and between mobile networks and incumbent services such as radar. In dense cell-free deployments, it might also not be possible to have full channel state information for all users at all antennas. To leverage location information in a dense deployment area, we suggest and investigate several algorithmic alterations on existing precoding methods, aimed at location-informed interference suppression, for usage in existing and emerging systems where user locations are known. The proposed algorithms are derived using a theoretical channel model and validated and numerically evaluated using an empirical dataset containing channel measurements from an indoor distributed Massive MIMO testbed. When dealing with measured CSI, the impact of the hardware, in addition to the location-based channel, needs to be compensated for. We propose a method to calibrate the hardware and achieve measurement-based evaluation of our location-based interference suppression algorithms. The results demonstrate that the proposed methods allow location-based interference suppression without explicit CSI knowledge at the transmitter, under certain realistic network conditions.
Building a real-time physical layer labeled data logging facility for 6G research
Oct 02, 2024


This work describes the architecture and vision of designing and implementing a new test infrastructure for 6G physical layer research at KU Leuven. The Testbed is designed for physical layer research and experimentation following several emerging trends, such as cell-free networking, integrated communication, sensing, open disaggregated Radio Access Networks, AI-Native design, and multiband operation. The software is almost entirely based on free and open-source software, making contributing and reusing any component easy. The open Testbed is designed to provide real-time and labeled data on all parts of the physical layer, from raw IQ data to synchronization statistics, channel state information, or symbol/bit/packet error rates. Real-time labeled datasets can be collected by synchronizing the physical layer data logging with a positioning and motion capture system. One of the main goals of the design is to make it open and accessible to external users remotely. Most tests and data captures can easily be automated, and experiment code can be remotely deployed using standard containers (e.g., Docker or Podman). Finally, the paper describes how the Testbed can be used for our research on joint communication and sensing, over-the-air synchronization, distributed processing, and AI in the loop.
Remote ID for separation provision and multi-agent navigation
Sep 02, 2023



In this paper, we investigate the integration of drone identification data (Remote ID) with collision avoidance mechanisms to improve the safety and efficiency of multi-drone operations. We introduce an improved Near Mid-Air Collision (NMAC) definition, termed as UAV NMAC (uNMAC), which accounts for uncertainties in the drone's location due to self-localization errors and possible displacements between two location reports. Our proposed uNMAC-based Reciprocal Velocity Obstacle (RVO) model integrates Remote ID messages with RVO to enable enhanced collision-free navigation. We propose modifications to the Remote ID format to include data on localization accuracy and drone airframe size, facilitating more efficient collision avoidance decisions. Through extensive simulations, we demonstrate that our approach halves mission execution times compared to a conservative standard Remote ID-based RVO. Importantly, it ensures collision-free operations even under localization uncertainties. By integrating the improved Remote ID messages and uNMAC-based RVO, we offer a solution to significantly increase airspace capacity while adhering to strict safety standards. Our study emphasizes the potential to augment the safety and efficiency of future drone operations, thereby benefiting industries reliant on drone technologies.