 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParticipatory AI, Public Sector AI, Differential Privacy, Conversational Interfaces, Explainable AI, Citizen Engagement in AI
Apr 30, 2025



This paper introduces a conversational interface system that enables participatory design of differentially private AI systems in public sector applications. Addressing the challenge of balancing mathematical privacy guarantees with democratic accountability, we propose three key contributions: (1) an adaptive $\epsilon$-selection protocol leveraging TOPSIS multi-criteria decision analysis to align citizen preferences with differential privacy (DP) parameters, (2) an explainable noise-injection framework featuring real-time Mean Absolute Error (MAE) visualizations and GPT-4-powered impact analysis, and (3) an integrated legal-compliance mechanism that dynamically modulates privacy budgets based on evolving regulatory constraints. Our results advance participatory AI practices by demonstrating how conversational interfaces can enhance public engagement in algorithmic privacy mechanisms, ensuring that privacy-preserving AI in public sector governance remains both mathematically robust and democratically accountable.
A Self-Adaptive IoT-based Approach for Improving the Decision Making of Active Surgical Robots in Hospitals
Jul 30, 2021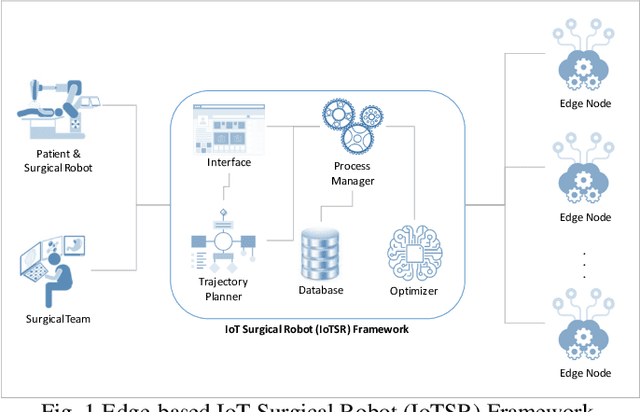



In recent years, surgical robots have become instrumental tools for assisting surgeons in performing complex surgical procedures in hospitals. Unlike conventional surgical methods, robotic systems help surgeons, for example, to perform minimally invasive surgical procedures while enhancing the precision and control of operations (e.g. tiny incisions, wound sutures, endoscopic suturing, among others). To this extent, it is essential to consider several factors that may influence the feasibility and decision making of employing robotic systems in surgical procedures. In this paper, we propose an IoT-based self-adaptive approach that uses multi-criteria decision analysis methods (MCDA) for enhancing the decision making of operations involving surgical robots. Throughout this paper, we present experimental validation results in utilizing MCDA as an effective strategy for enhancing the decisions of employing robotic systems in surgical procedures.