 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Reduced Order Model for Emergent Mechanics in Woven Systems
Jun 22, 2026Woven structures exhibit rich mechanical behaviors including anisotropic stiffness, shear-induced locking, and crimp interchange that emerge purely from the geometric arrangement of individual weavers rather than from constituent material properties. Existing models either homogenize these interactions or resolve them at prohibitive computational cost. We introduce a reduced-order model that bridges this gap by representing individual weaver interactions through a system of nodes and four physically interpretable stiffness elements capturing axial deformation, in-plane uncrimping, inter-weaver shear, and frictional slip. Eigenvalue analysis of the unit cell confirms that the lowest-energy deformation modes correspond directly to known weave-specific phenomena, and that each element is necessary for a complete kinematic and mechanistic description. Element stiffness parameters are calibrated against empirical three-point bending and shear data, achieving agreement within 5% across varied weaver widths and spacings. The validated model is then applied to demonstrate capabilities beyond the reach of continuum approaches including: the emergent Poisson's response arising from crimp interchange, stepwise force reduction during progressive weaver pullout, stress localization under three distinct tearing configurations, and programmable mechanical anisotropy through spatially graded weaver stiffness. The physical transparency and computational efficiency of the framework position it as a practical tool for the analysis and design of woven architected materials with programmable mechanical response.
Harnessing Interpretable Machine Learning for Origami Feature Design and Pattern Selection
Apr 12, 2022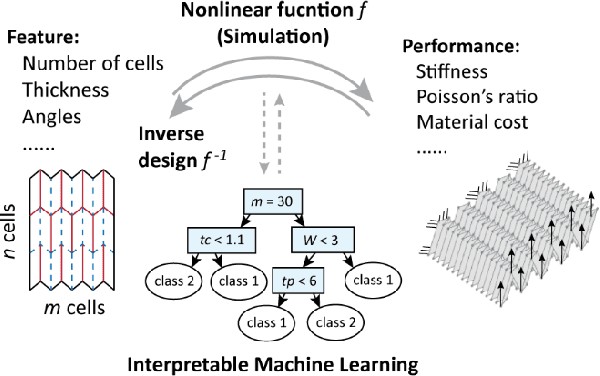
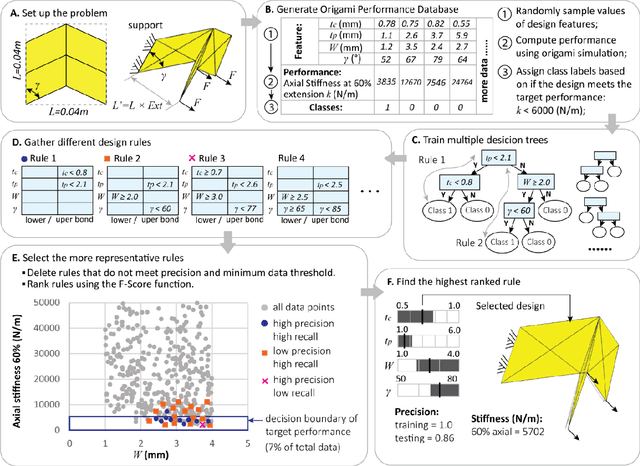
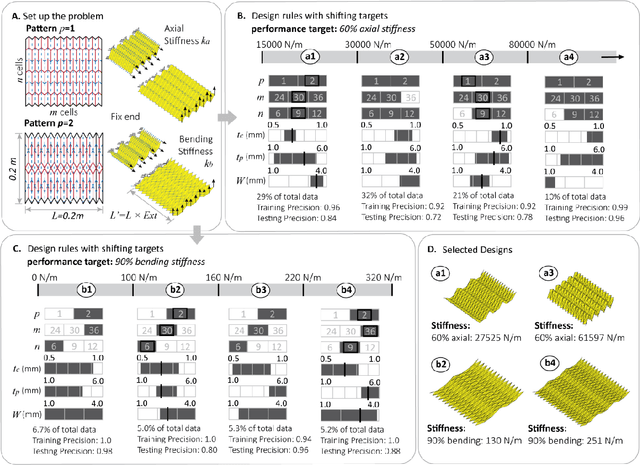
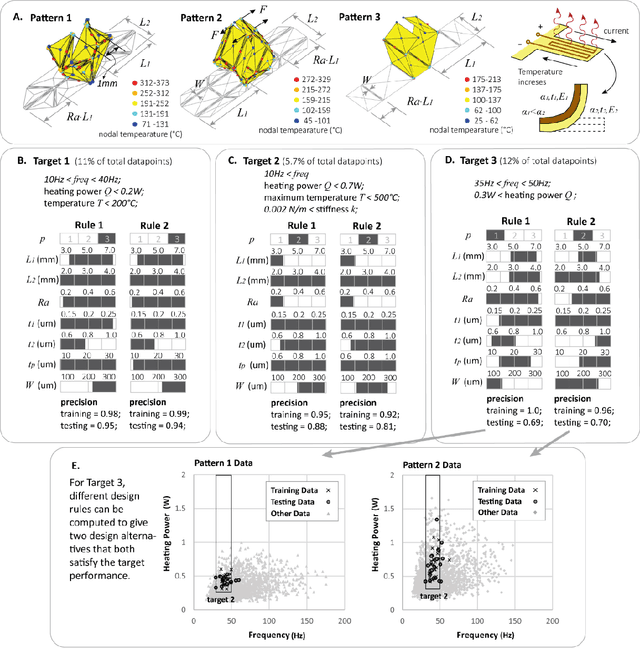
Engineering design of origami systems is challenging because comparing different origami patterns requires using categorical features and evaluating multi-physics behavior targets introduces multi-objective problems. This work shows that a decision tree machine learning method is particularly suitable for the inverse design of origami. This interpretable machine learning method can reveal complex interactions between categorical features and continuous features for comparing different origami patterns, can tackle multi-objective problems for designing active origami with multi-physics performance targets, and can extend existing origami shape fitting algorithms to further consider non-geometrical performances of origami systems. The proposed framework shows a holistic way of designing active origami systems for various applications such as metamaterials, deployable structures, soft robots, biomedical devices, and many more.
Rapid Multi-Physics Simulation for Electro-Thermal Origami Robotic Systems
Feb 19, 2021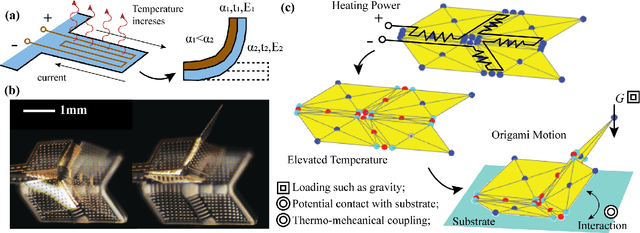
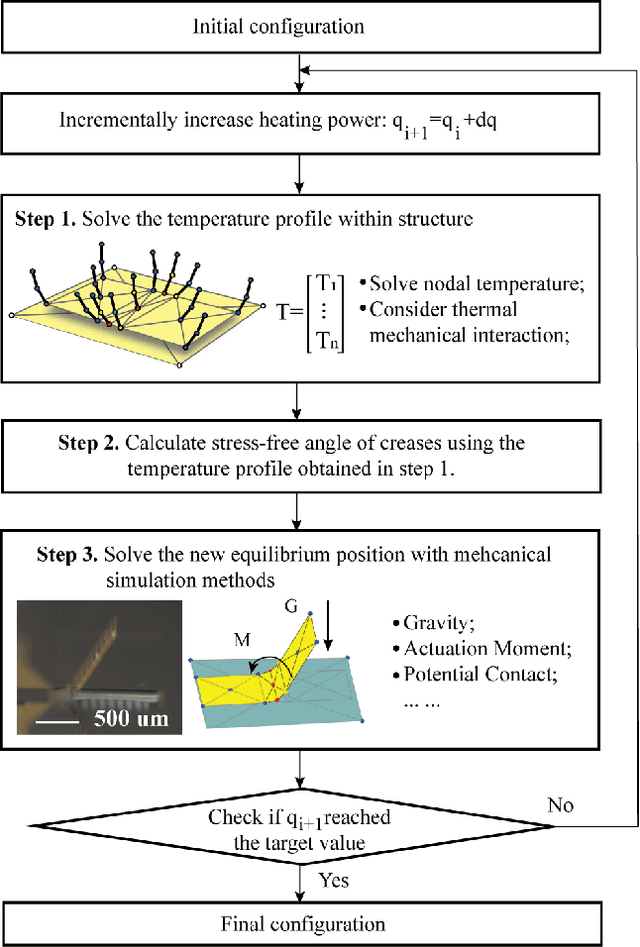
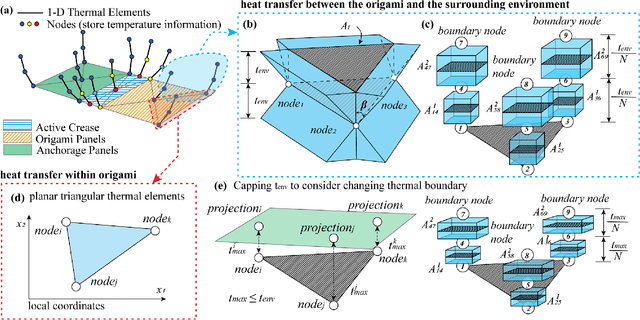
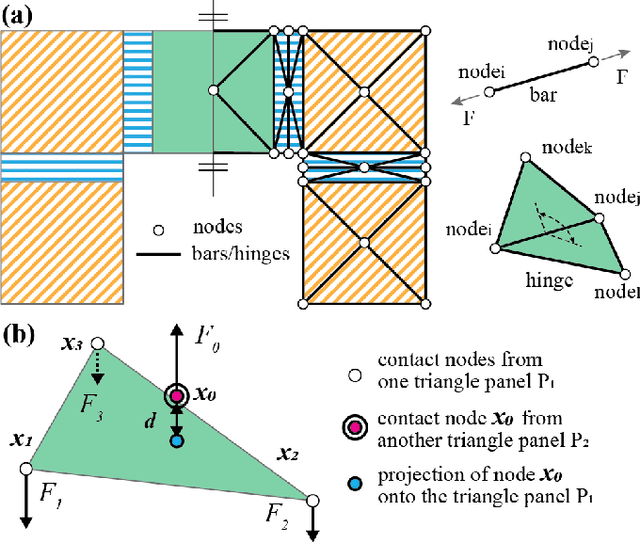
Electro-thermally actuated origami provides a novel method for creating 3-D systems with advanced morphing and functional capabilities. However, it is currently difficult to simulate the multi-physical behavior of such systems because the electro-thermal actuation and large folding deformations are highly interdependent. In this work, we introduce a rapid multi-physics simulation framework for electro-thermal origami robotic systems that can capture: thermo-mechancially coupled actuation, inter panel contact, heat transfer, large deformation folding, and other complex loading applied onto the origami. Comparisons with finite element simulations validate the proposed framework for capturing origami heat transfer with different system geometries, materials, and surrounding environments. Verification against physical electro-thermal micro origami further demonstrates the validity of the proposed model. Simulations of more complex origami patterns and a case study for origami optimization are provided as application examples to show the capability and efficiency of the model. The framework provides a novel simulation tool for analysis, design, control, and optimization of active origami robotic systems, pushing the boundary for feasible morphing and functional capability.