 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConfidence Sets for Multidimensional Scaling
Oct 25, 2025We develop a formal statistical framework for classical multidimensional scaling (CMDS) applied to noisy dissimilarity data. We establish distributional convergence results for the embeddings produced by CMDS for various noise models, which enable the construction of \emph{bona~fide} uniform confidence sets for the latent configuration, up to rigid transformations. We further propose bootstrap procedures for constructing these confidence sets and provide theoretical guarantees for their validity. We find that the multiplier bootstrap adapts automatically to heteroscedastic noise such as multiplicative noise, while the empirical bootstrap seems to require homoscedasticity. Either form of bootstrap, when valid, is shown to substantially improve finite-sample accuracy. The empirical performance of the proposed methods is demonstrated through numerical experiments.
Minimax Optimality of Classical Scaling Under General Noise Conditions
Feb 02, 2025We establish the consistency of classical scaling under a broad class of noise models, encompassing many commonly studied cases in literature. Our approach requires only finite fourth moments of the noise, significantly weakening standard assumptions. We derive convergence rates for classical scaling and establish matching minimax lower bounds, demonstrating that classical scaling achieves minimax optimality in recovering the true configuration even when the input dissimilarities are corrupted by noise.
Graph Max Shift: A Hill-Climbing Method for Graph Clustering
Nov 27, 2024We present a method for graph clustering that is analogous with gradient ascent methods previously proposed for clustering points in space. We show that, when applied to a random geometric graph with data iid from some density with Morse regularity, the method is asymptotically consistent. Here, consistency is understood with respect to a density-level clustering defined by the partition of the support of the density induced by the basins of attraction of the density modes.
An Axiomatic Definition of Hierarchical Clustering
Jul 04, 2024In this paper, we take an axiomatic approach to defining a population hierarchical clustering for piecewise constant densities, and in a similar manner to Lebesgue integration, extend this definition to more general densities. When the density satisfies some mild conditions, e.g., when it has connected support, is continuous, and vanishes only at infinity, or when the connected components of the density satisfy these conditions, our axiomatic definition results in Hartigan's definition of cluster tree.
Embedding Functional Data: Multidimensional Scaling and Manifold Learning
Aug 30, 2022We adapt concepts, methodology, and theory originally developed in the areas of multidimensional scaling and dimensionality reduction for multivariate data to the functional setting. We focus on classical scaling and Isomap -- prototypical methods that have played important roles in these area -- and showcase their use in the context of functional data analysis. In the process, we highlight the crucial role that the ambient metric plays.
Supervising Embedding Algorithms Using the Stress
Jul 14, 2022
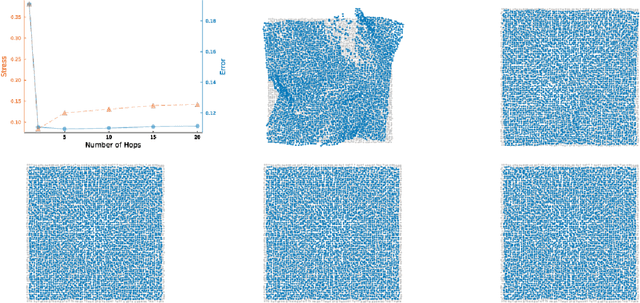
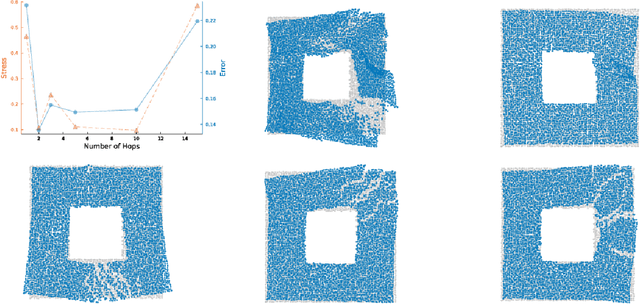
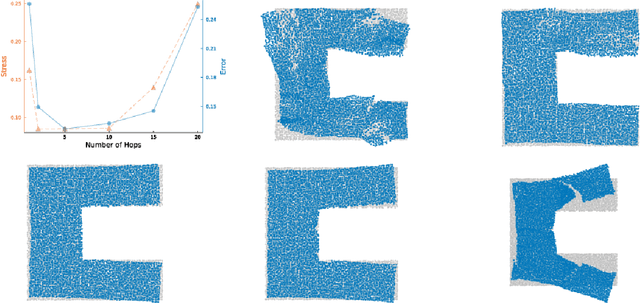
While classical scaling, just like principal component analysis, is parameter-free, most other methods for embedding multivariate data require the selection of one or several parameters. This tuning can be difficult due to the unsupervised nature of the situation. We propose a simple, almost obvious, approach to supervise the choice of tuning parameter(s): minimize a notion of stress. We substantiate this choice by reference to rigidity theory. We extend a result by Aspnes et al. (IEEE Mobile Computing, 2006), showing that general random geometric graphs are trilateration graphs with high probability. And we provide a stability result \`a la Anderson et al. (SIAM Discrete Mathematics, 2010). We illustrate this approach in the context of the MDS-MAP(P) algorithm of Shang and Ruml (IEEE INFOCOM, 2004). As a prototypical patch-stitching method, it requires the choice of patch size, and we use the stress to make that choice data-driven. In this context, we perform a number of experiments to illustrate the validity of using the stress as the basis for tuning parameter selection. In so doing, we uncover a bias-variance tradeoff, which is a phenomenon which may have been overlooked in the multidimensional scaling literature. By turning MDS-MAP(P) into a method for manifold learning, we obtain a local version of Isomap for which the minimization of the stress may also be used for parameter tuning.
Clustering by Hill-Climbing: Consistency Results
Feb 18, 2022We consider several hill-climbing approaches to clustering as formulated by Fukunaga and Hostetler in the 1970's. We study both continuous-space and discrete-space (i.e., medoid) variants and establish their consistency.
An Asymptotic Equivalence between the Mean-Shift Algorithm and the Cluster Tree
Nov 19, 2021
Two important nonparametric approaches to clustering emerged in the 1970's: clustering by level sets or cluster tree as proposed by Hartigan, and clustering by gradient lines or gradient flow as proposed by Fukunaga and Hosteler. In a recent paper, we argue the thesis that these two approaches are fundamentally the same by showing that the gradient flow provides a way to move along the cluster tree. In making a stronger case, we are confronted with the fact the cluster tree does not define a partition of the entire support of the underlying density, while the gradient flow does. In the present paper, we resolve this conundrum by proposing two ways of obtaining a partition from the cluster tree -- each one of them very natural in its own right -- and showing that both of them reduce to the partition given by the gradient flow under standard assumptions on the sampling density.
Level Sets or Gradient Lines? A Unifying View of Modal Clustering
Sep 17, 2021
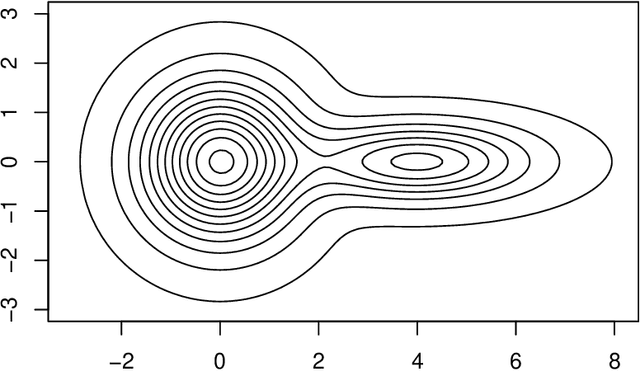
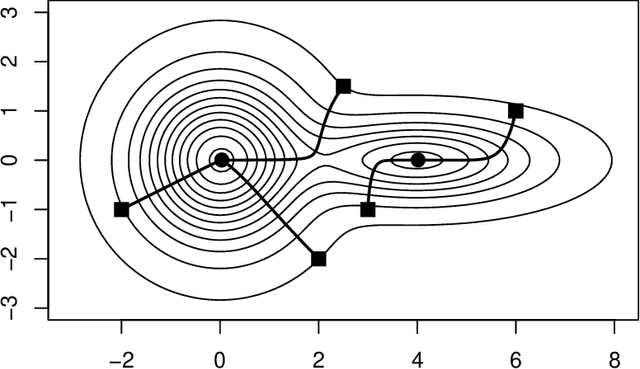
The paper establishes a strong correspondence, if not an equivalence, between two important clustering approaches that emerged in the 1970's: clustering by level sets or cluster tree as proposed by Hartigan and clustering by gradient lines or gradient flow as proposed by Fukunaga and Hosteler.
Minimax Estimation of Distances on a Surface and Minimax Manifold Learning in the Isometric-to-Convex Setting
Nov 25, 2020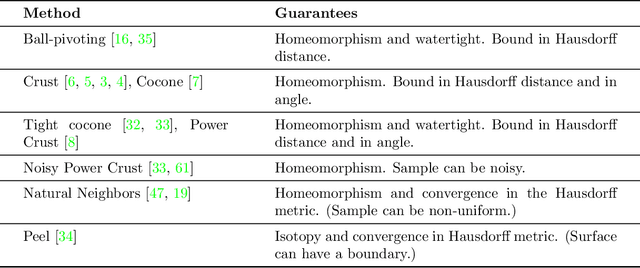
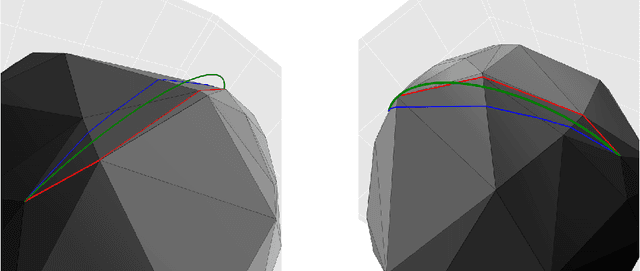
We start by considering the problem of estimating intrinsic distances on a smooth surface. We show that sharper estimates can be obtained via a reconstruction of the surface, and discuss the use of the tangential Delaunay complex for that purpose. We further show that the resulting approximation rate is in fact optimal in an information-theoretic (minimax) sense. We then turn to manifold learning and argue that a variant of Isomap where the distances are instead computed on a reconstructed surface is minimax optimal for the problem of isometric manifold embedding.