 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFisheye3R: Adapting Unified 3D Feed-Forward Foundation Models to Fisheye Lenses
Mar 30, 2026Feed-forward foundation models for multi-view 3-dimensional (3D) reconstruction have been trained on large-scale datasets of perspective images; when tested on wide field-of-view images, e.g., from a fisheye camera, their performance degrades. Their error arises from changes in spatial positions of pixels due to a non-linear projection model that maps 3D points onto the 2D image plane. While one may surmise that training on fisheye images would resolve this problem, there are far fewer fisheye images with ground truth than perspective images, which limit generalization. To enable inference on imagery exhibiting high radial distortion, we propose Fisheye3R, a novel adaptation framework that extends these multi-view 3D reconstruction foundation models to natively accommodate fisheye inputs without performance regression on perspective images. To address the scarcity of fisheye images and ground truth, we introduce flexible learning schemes that support self-supervised adaptation using only unlabeled perspective images and supervised adaptation without any fisheye training data. Extensive experiments across three foundation models, including VGGT, $π^3$, and MapAnything, demonstrate that our approach consistently improves camera pose, depth, point map, and field-of-view estimation on fisheye images.
Learned Monocular Depth Priors in Visual-Inertial Initialization
Apr 20, 2022
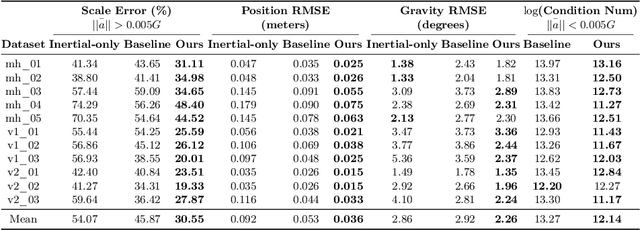
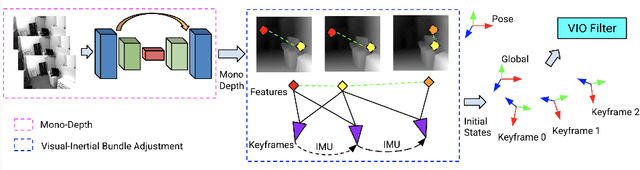
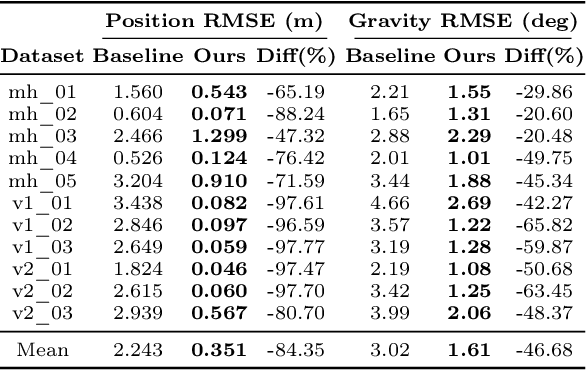
Visual-inertial odometry (VIO) is the pose estimation backbone for most AR/VR and autonomous robotic systems today, in both academia and industry. However, these systems are highly sensitive to the initialization of key parameters such as sensor biases, gravity direction, and metric scale. In practical scenarios where high-parallax or variable acceleration assumptions are rarely met (e.g. hovering aerial robot, smartphone AR user not gesticulating with phone), classical visual-inertial initialization formulations often become ill-conditioned and/or fail to meaningfully converge. In this paper we target visual-inertial initialization specifically for these low-excitation scenarios critical to in-the-wild usage. We propose to circumvent the limitations of classical visual-inertial structure-from-motion (SfM) initialization by incorporating a new learning-based measurement as a higher-level input. We leverage learned monocular depth images (mono-depth) to constrain the relative depth of features, and upgrade the mono-depth to metric scale by jointly optimizing for its scale and shift. Our experiments show a significant improvement in problem conditioning compared to a classical formulation for visual-inertial initialization, and demonstrate significant accuracy and robustness improvements relative to the state-of-the-art on public benchmarks, particularly under motion-restricted scenarios. We further extend this improvement to implementation within an existing odometry system to illustrate the impact of our improved initialization method on resulting tracking trajectories.