 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUSV Obstacles Detection and Tracking in Marine Environments
Nov 11, 2025Developing a robust and effective obstacle detection and tracking system for Unmanned Surface Vehicle (USV) at marine environments is a challenging task. Research efforts have been made in this area during the past years by GRAAL lab at the university of Genova that resulted in a methodology for detecting and tracking obstacles on the image plane and, then, locating them in the 3D LiDAR point cloud. In this work, we continue on the developed system by, firstly, evaluating its performance on recently published marine datasets. Then, we integrate the different blocks of the system on ROS platform where we could test it in real-time on synchronized LiDAR and camera data collected in various marine conditions available in the MIT marine datasets. We present a thorough experimental analysis of the results obtained using two approaches; one that uses sensor fusion between the camera and LiDAR to detect and track the obstacles and the other uses only the LiDAR point cloud for the detection and tracking. In the end, we propose a hybrid approach that merges the advantages of both approaches to build an informative obstacles map of the surrounding environment to the USV.
Kinetostatic Optimization for Kinematic Redundancy Planning of Nimbl'Bot Robot
Mar 29, 2023



<jats:title>Abstract</jats:title> <jats:p>In manufacturing industry, Computer Numerical Control (CNC) machines are often preferred over Industrial Serial Robots (ISR) for machining tasks. Indeed, CNC machines offer high positioning accuracy, which leads to slight dimensional deviation on the final product. However, these machines have a restricted workspace generating limitations in the machining work. Conversely, ISR are typically characterized by a larger workspace. ISR have already shown satisfactory performance in tasks like polishing, grinding and deburring. This paper proposes a kinematic redundant robot composed of a novel two degrees-of-freedom mechanism with a closed-loop kinematic chain. After describing a task priority inverse kinematic control framework used for joint trajectory planning exploiting the robot kinematic redundancy, the paper analyses the kinetostatic performance of this robot depending on the considered control tasks. Moreover, two kinetostatic tasks are introduced and employed to improve the robot performance. Simulation results show how the robot better performs when the optimization tasks are active.</jats:p>
A Hierarchical Architecture for Human-Robot Cooperation Processes
Sep 06, 2020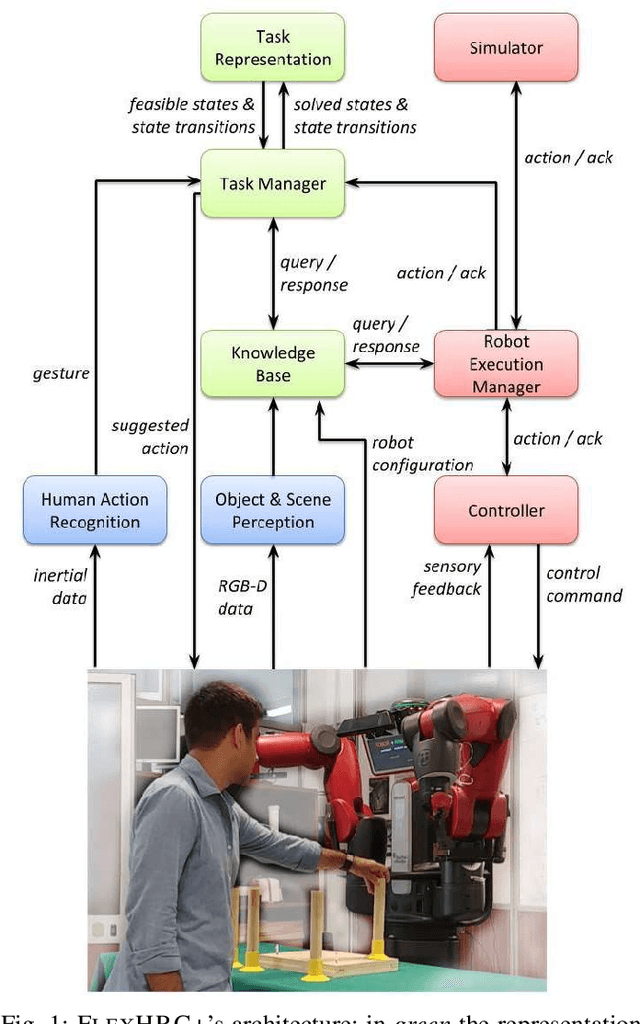
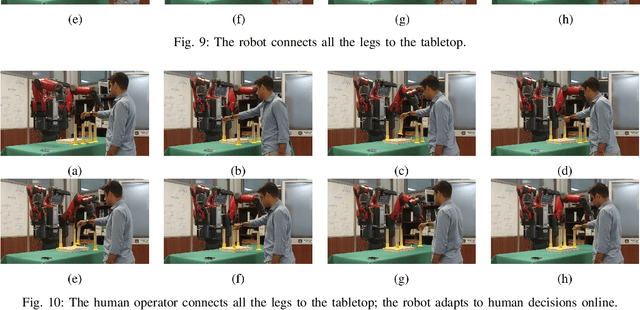
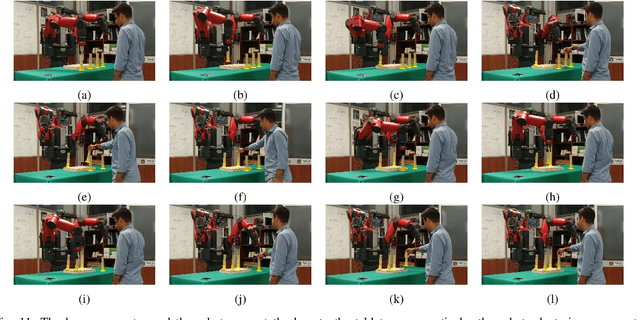
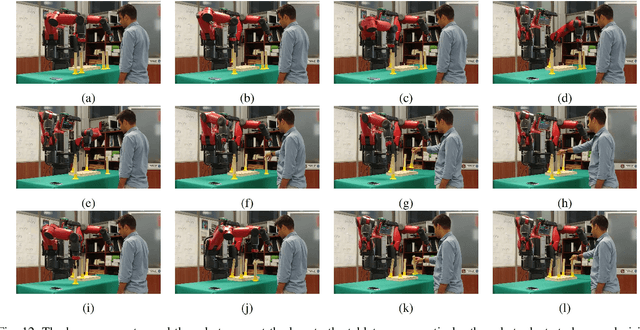
In this paper we propose FlexHRC+, a hierarchical human-robot cooperation architecture designed to provide collaborative robots with an extended degree of autonomy when supporting human operators in high-variability shop-floor tasks. The architecture encompasses three levels, namely for perception, representation, and action. Building up on previous work, here we focus on (i) an in-the-loop decision making process for the operations of collaborative robots coping with the variability of actions carried out by human operators, and (ii) the representation level, integrating a hierarchical AND/OR graph whose online behaviour is formally specified using First Order Logic. The architecture is accompanied by experiments including collaborative furniture assembly and object positioning tasks.
Flexible human-robot cooperation models for assisted shop-floor tasks
Jul 09, 2017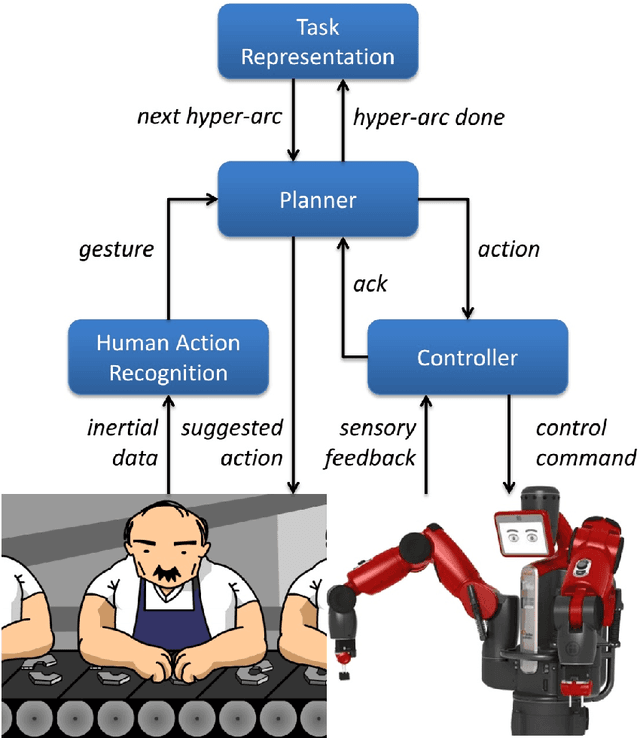
The Industry 4.0 paradigm emphasizes the crucial benefits that collaborative robots, i.e., robots able to work alongside and together with humans, could bring to the whole production process. In this context, an enabling technology yet unreached is the design of flexible robots able to deal at all levels with humans' intrinsic variability, which is not only a necessary element for a comfortable working experience for the person but also a precious capability for efficiently dealing with unexpected events. In this paper, a sensing, representation, planning and control architecture for flexible human-robot cooperation, referred to as FlexHRC, is proposed. FlexHRC relies on wearable sensors for human action recognition, AND/OR graphs for the representation of and reasoning upon cooperation models, and a Task Priority framework to decouple action planning from robot motion planning and control.