 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbodied AI in Action: Insights from SAE World Congress 2026 on Safety, Trust, Robotics, and Real-World Deployment
May 11, 2026Embodied artificial intelligence is rapidly moving from research into real-world systems such as autonomous vehicles, mobile robots, and industrial machines. As these systems become more capable of perceiving, deciding, and acting in dynamic environments, they also introduce new challenges in safety, trust, governance, and operational reliability. This white paper summarizes key insights from the SAE World Congress 2026 panel session \textit{Embodied AI in Action}, which brought together experts from automotive, robotics, artificial intelligence, and safety engineering. The discussion highlighted the need to treat embodied AI as a systems challenge requiring engineering rigor, lifecycle governance, human-centered design, and evolving standards. The paper provides practical perspectives for executives, policymakers, and technical leaders seeking to adopt embodied AI responsibly. The panel reached broad agreement that long-term success will depend not only on advances in AI capability, but equally on safe and trustworthy deployment.
On the Assessment of Sensitivity of Autonomous Vehicle Perception
Jan 30, 2026The viability of automated driving is heavily dependent on the performance of perception systems to provide real-time accurate and reliable information for robust decision-making and maneuvers. These systems must perform reliably not only under ideal conditions, but also when challenged by natural and adversarial driving factors. Both of these types of interference can lead to perception errors and delays in detection and classification. Hence, it is essential to assess the robustness of the perception systems of automated vehicles (AVs) and explore strategies for making perception more reliable. We approach this problem by evaluating perception performance using predictive sensitivity quantification based on an ensemble of models, capturing model disagreement and inference variability across multiple models, under adverse driving scenarios in both simulated environments and real-world conditions. A notional architecture for assessing perception performance is proposed. A perception assessment criterion is developed based on an AV's stopping distance at a stop sign on varying road surfaces, such as dry and wet asphalt, and vehicle speed. Five state-of-the-art computer vision models are used, including YOLO (v8-v9), DEtection TRansformer (DETR50, DETR101), Real-Time DEtection TRansformer (RT-DETR)in our experiments. Diminished lighting conditions, e.g., resulting from the presence of fog and low sun altitude, have the greatest impact on the performance of the perception models. Additionally, adversarial road conditions such as occlusions of roadway objects increase perception sensitivity and model performance drops when faced with a combination of adversarial road conditions and inclement weather conditions. Also, it is demonstrated that the greater the distance to a roadway object, the greater the impact on perception performance, hence diminished perception robustness.
Ontology-Based Reasoning about the Trustworthiness of Cyber-Physical Systems
Mar 20, 2018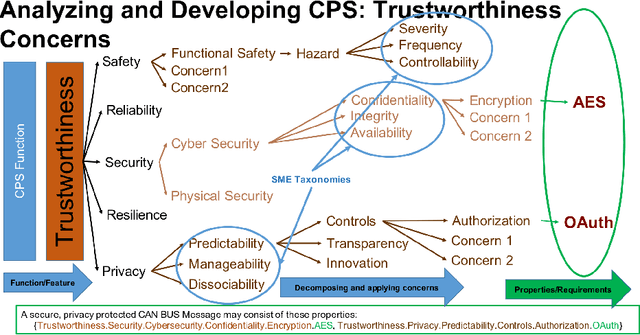
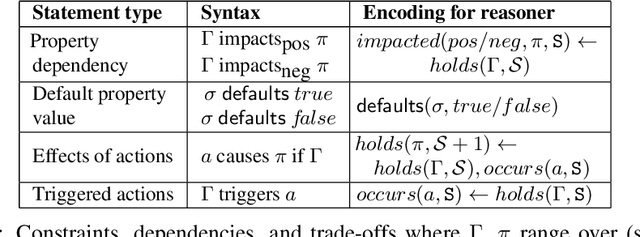
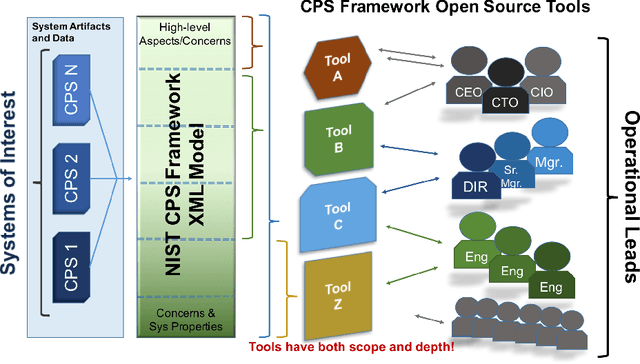
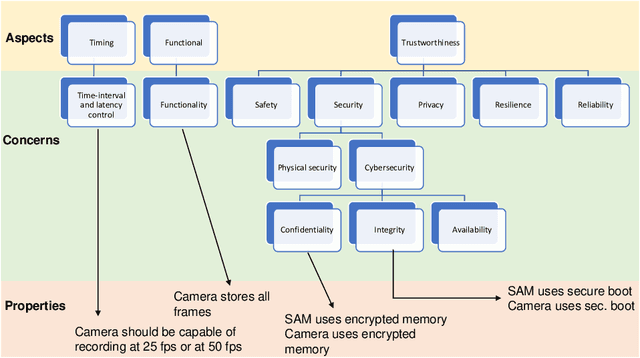
It has been challenging for the technical and regulatory communities to formulate requirements for trustworthiness of the cyber-physical systems (CPS) due to the complexity of the issues associated with their design, deployment, and operations. The US National Institute of Standards and Technology (NIST), through a public working group, has released a CPS Framework that adopts a broad and integrated view of CPS and positions trustworthiness among other aspects of CPS. This paper takes the model created by the CPS Framework and its further developments one step further, by applying ontological approaches and reasoning techniques in order to achieve greater understanding of CPS. The example analyzed in the paper demonstrates the enrichment of the original CPS model obtained through ontology and reasoning and its ability to deliver additional insights to the developers and operators of CPS.