 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEdgeRunner 20B: Military Task Parity with GPT-5 while Running on the Edge
Oct 30, 2025We present EdgeRunner 20B, a fine-tuned version of gpt-oss-20b optimized for military tasks. EdgeRunner 20B was trained on 1.6M high-quality records curated from military documentation and websites. We also present four new tests sets: (a) combat arms, (b) combat medic, (c) cyber operations, and (d) mil-bench-5k (general military knowledge). On these military test sets, EdgeRunner 20B matches or exceeds GPT-5 task performance with 95%+ statistical significance, except for the high reasoning setting on the combat medic test set and the low reasoning setting on the mil-bench-5k test set. Versus gpt-oss-20b, there is no statistically-significant regression on general-purpose benchmarks like ARC-C, GPQA Diamond, GSM8k, IFEval, MMLU Pro, or TruthfulQA, except for GSM8k in the low reasoning setting. We also present analyses on hyperparameter settings, cost, and throughput. These findings show that small, locally-hosted models are ideal solutions for data-sensitive operations such as in the military domain, allowing for deployment in air-gapped edge devices.
A Hybrid Approach for Reinforcement Learning Using Virtual Policy Gradient for Balancing an Inverted Pendulum
Feb 06, 2021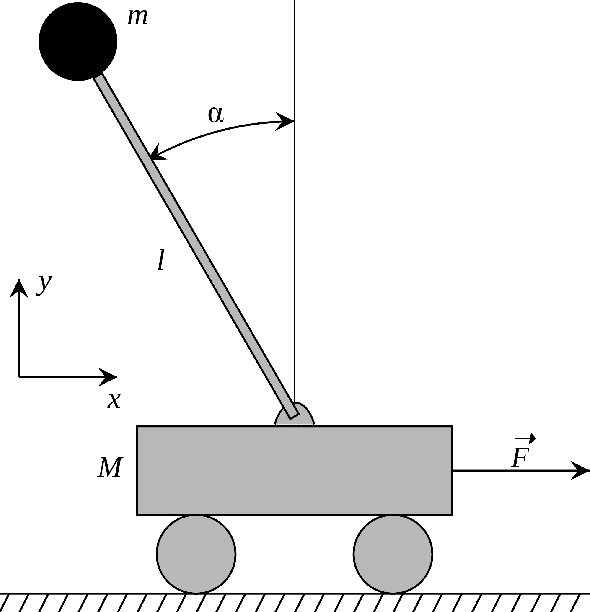
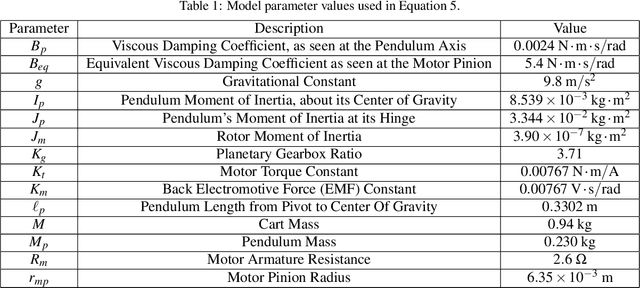
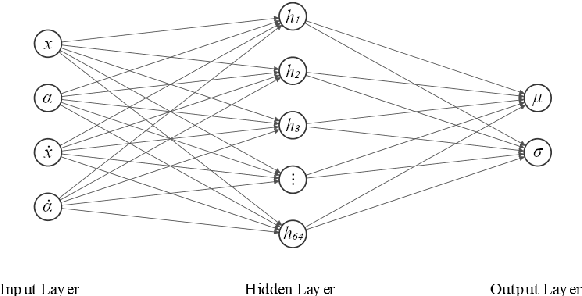
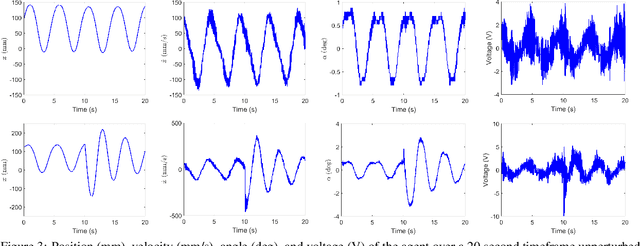
Using the policy gradient algorithm, we train a single-hidden-layer neural network to balance a physically accurate simulation of a single inverted pendulum. The trained weights and biases can then be transferred to a physical agent, where they are robust enough to to balance a real inverted pendulum. This hybrid approach of training a simulation allows thousands of trial runs to be completed orders of magnitude faster than would be possible in the real world, resulting in greatly reduced training time and more iterations, producing a more robust model. When compared with existing reinforcement learning methods, the resulting control is smoother, learned faster, and able to withstand forced disturbances.
Recommending More Efficient Workflows to Software Developers
Feb 06, 2021Existing recommendation systems can help developers improve their software development abilities by recommending new programming tools, such as a refactoring tool or a program navigation tool. However, simply recommending tools in isolation may not, in and of itself, allow developers to successfully complete their tasks. In this paper, I introduce a new recommendation system that recommends workflows, or sequences of tools, to developers. By learning more efficient workflows, the system could make software developers more efficient.