 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVAIC: Vision-Guided Humanoid Agile Object Interaction Control via Decoupled Commands
Jun 08, 2026Humanoid robots hold immense potential for real-world assistance, yet agile interaction with objects in unstructured environments demands tightly coupled whole-body coordination. Despite recent advancements, current controllers face a critical deployment gap. They rely heavily on dense reference trajectories and perfect state observability, which inherently limits physical generalization. We present Vision Guided Agile Interaction Control (VAIC), a unified framework that bridges this gap by operating exclusively on onboard depth, historical proprioception, and a decoupled user command interface. VAIC employs a two-stage distillation paradigm. First, a privileged teacher policy masters diverse interaction skills using precise object kinematics and exact environmental states. Second, a deployable student policy distills these capabilities by replacing full body tracking with velocity targets across multiple axes and an interaction indicator for each frame. The student utilizes a recurrent object adaptation module to implicitly infer unobservable object dynamics from raw depth streams and proprioception. Evaluations and real-world deployments on the humanoid robot demonstrate that a single VAIC policy successfully executes highly diverse dynamic tasks. These tasks include box carrying, cart interaction, and skateboarding, consistently outperforming baselines and advancing autonomous humanoid deployment.
T2S-Bench & Structure-of-Thought: Benchmarking and Prompting Comprehensive Text-to-Structure Reasoning
Mar 04, 2026Think about how human handles complex reading tasks: marking key points, inferring their relationships, and structuring information to guide understanding and responses. Likewise, can a large language model benefit from text structure to enhance text-processing performance? To explore it, in this work, we first introduce Structure of Thought (SoT), a prompting technique that explicitly guides models to construct intermediate text structures, consistently boosting performance across eight tasks and three model families. Building upon this insight, we present T2S-Bench, the first benchmark designed to evaluate and improve text-to-structure capabilities of models. T2S-Bench includes 1.8K samples across 6 scientific domains and 32 structural types, rigorously constructed to ensure accuracy, fairness, and quality. Evaluation on 45 mainstream models reveals substantial improvement potential: the average accuracy on the multi-hop reasoning task is only 52.1%, and even the most advanced model achieves 58.1% node accuracy in end-to-end extraction. Furthermore, on Qwen2.5-7B-Instruct, SoT alone yields an average +5.7% improvement across eight diverse text-processing tasks, and fine-tuning on T2S-Bench further increases this gain to +8.6%. These results highlight the value of explicit text structuring and the complementary contributions of SoT and T2S-Bench. Dataset and eval code have been released at https://t2s-bench.github.io/T2S-Bench-Page/.
HAIC: Humanoid Agile Object Interaction Control via Dynamics-Aware World Model
Feb 12, 2026Humanoid robots show promise for complex whole-body tasks in unstructured environments. Although Human-Object Interaction (HOI) has advanced, most methods focus on fully actuated objects rigidly coupled to the robot, ignoring underactuated objects with independent dynamics and non-holonomic constraints. These introduce control challenges from coupling forces and occlusions. We present HAIC, a unified framework for robust interaction across diverse object dynamics without external state estimation. Our key contribution is a dynamics predictor that estimates high-order object states (velocity, acceleration) solely from proprioceptive history. These predictions are projected onto static geometric priors to form a spatially grounded dynamic occupancy map, enabling the policy to infer collision boundaries and contact affordances in blind spots. We use asymmetric fine-tuning, where a world model continuously adapts to the student policy's exploration, ensuring robust state estimation under distribution shifts. Experiments on a humanoid robot show HAIC achieves high success rates in agile tasks (skateboarding, cart pushing/pulling under various loads) by proactively compensating for inertial perturbations, and also masters multi-object long-horizon tasks like carrying a box across varied terrain by predicting the dynamics of multiple objects.
InterAct: Advancing Large-Scale Versatile 3D Human-Object Interaction Generation
Sep 11, 2025While large-scale human motion capture datasets have advanced human motion generation, modeling and generating dynamic 3D human-object interactions (HOIs) remain challenging due to dataset limitations. Existing datasets often lack extensive, high-quality motion and annotation and exhibit artifacts such as contact penetration, floating, and incorrect hand motions. To address these issues, we introduce InterAct, a large-scale 3D HOI benchmark featuring dataset and methodological advancements. First, we consolidate and standardize 21.81 hours of HOI data from diverse sources, enriching it with detailed textual annotations. Second, we propose a unified optimization framework to enhance data quality by reducing artifacts and correcting hand motions. Leveraging the principle of contact invariance, we maintain human-object relationships while introducing motion variations, expanding the dataset to 30.70 hours. Third, we define six benchmarking tasks and develop a unified HOI generative modeling perspective, achieving state-of-the-art performance. Extensive experiments validate the utility of our dataset as a foundational resource for advancing 3D human-object interaction generation. To support continued research in this area, the dataset is publicly available at https://github.com/wzyabcas/InterAct, and will be actively maintained.
Compliant Fins for Locomotion in Granular Media
Jan 16, 2021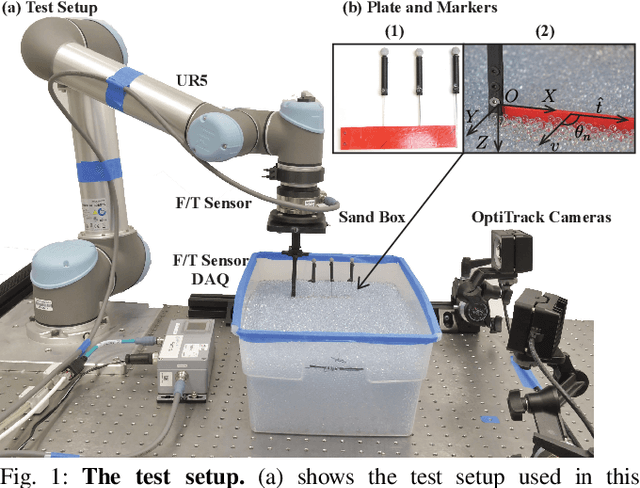
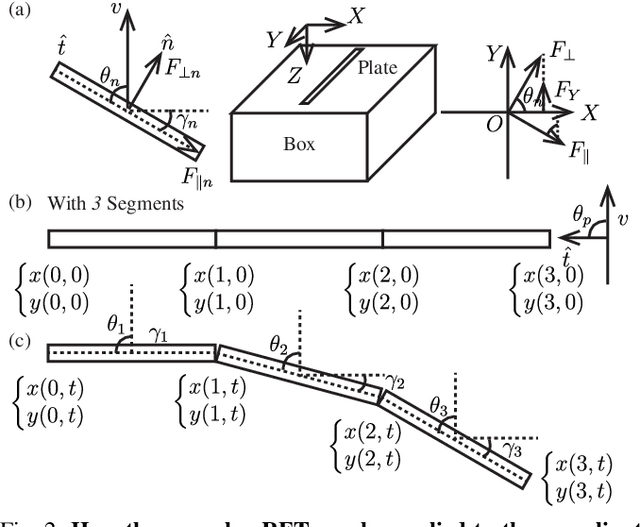
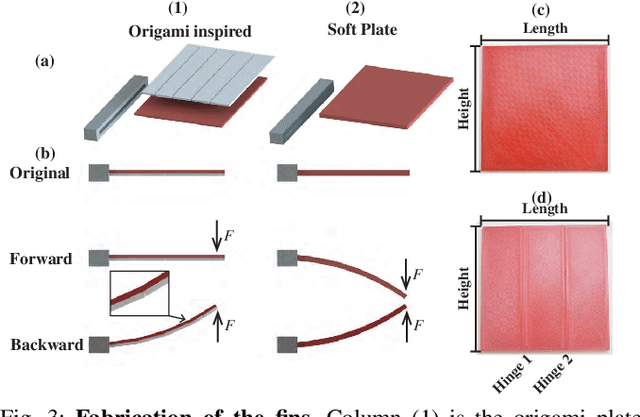
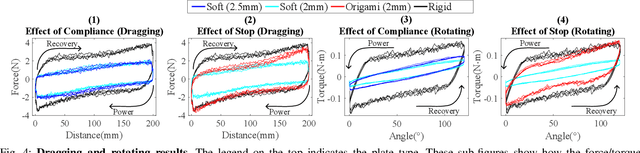
In this paper, we present an approach to study the behavior of compliant plates in granular media and optimize the performance of a robot that utilizes this technique for mobility. From previous work and fundamental tests on thin plate force generation inside granular media, we introduce an origami-inspired mechanism with non-linear compliance in the joints that can be used in granular propulsion. This concept utilizes one-sided joint limits to create an asymmetric gait cycle that avoids more complicated alternatives often found in other swimming/digging robots. To analyze its locomotion as well as its shape and propulsive force, we utilize granular Resistive Force Theory (RFT) as a starting point. Adding compliance to this theory enables us to predict the time-based evolution of compliant plates when they are dragged and rotated. It also permits more rational design of swimming robots where fin design variables may be optimized against the characteristics of the granular medium. This is done using a Python-based dynamic simulation library to model the deformation of the plates and optimize aspects of the robot's gait. Finally, we prototype and test robot with a gait optimized using the modelling techniques mentioned above.