 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComPose: When to Trust Hands for Object Pose Tracking
May 22, 2026Reconstructing the motion of objects from videos is a key component for embodied AI and robot manipulation. While diverse approaches to object pose tracking have been studied, they rely heavily on strong external priors, such as depth data or 3D templates, and remain highly vulnerable to severe occlusions by hand grasps despite the use of explicit masks. In this work, we present ComPose, a 6DoF object tracking framework designed for hand-aware object pose estimation from RGB video. Rather than treating the hand purely as an occluder, our method harmonizes hand motions as a \textit{complementary cue} for object tracking. In detail, we recover a variety of object motions over time by combining object and hand cues from foundation models within a unified tracking pipeline. Here, ComPose adaptively selects informative hand joints, combines object- and hand-derived cues for motion estimation, and refines the resulting object motion using visible geometric evidence and a learned correction. We further enforce the temporal consistency over both rotation and translation, yielding stable 3D object trajectories over time without any external smoothing. Extensive experiments show that our method is accurate, efficient, and robust under severe hand occlusion and geometric ambiguity. In addition, the resulting trajectories can also effectively transfer to downstream robot manipulation by enabling robots to reconstruct human actions from online videos.
SARA: Scene-Aware Reconstruction Accelerator
Jan 11, 2026We present SARA (Scene-Aware Reconstruction Accelerator), a geometry-driven pair selection module for Structure-from-Motion (SfM). Unlike conventional pipelines that select pairs based on visual similarity alone, SARA introduces geometry-first pair selection by scoring reconstruction informativeness - the product of overlap and parallax - before expensive matching. A lightweight pre-matching stage uses mutual nearest neighbors and RANSAC to estimate these cues, then constructs an Information-Weighted Spanning Tree (IWST) augmented with targeted edges for loop closure, long-baseline anchors, and weak-view reinforcement. Compared to exhaustive matching, SARA reduces rotation errors by 46.5+-5.5% and translation errors by 12.5+-6.5% across modern learned detectors, while achieving at most 50x speedup through 98% pair reduction (from 30,848 to 580 pairs). This reduces matching complexity from quadratic to quasi-linear, maintaining within +-3% of baseline reconstruction metrics for 3D Gaussian Splatting and SVRaster.
Chaining Event Spans for Temporal Relation Grounding
Jun 17, 2025Accurately understanding temporal relations between events is a critical building block of diverse tasks, such as temporal reading comprehension (TRC) and relation extraction (TRE). For example in TRC, we need to understand the temporal semantic differences between the following two questions that are lexically near-identical: "What finished right before the decision?" or "What finished right after the decision?". To discern the two questions, existing solutions have relied on answer overlaps as a proxy label to contrast similar and dissimilar questions. However, we claim that answer overlap can lead to unreliable results, due to spurious overlaps of two dissimilar questions with coincidentally identical answers. To address the issue, we propose a novel approach that elicits proper reasoning behaviors through a module for predicting time spans of events. We introduce the Timeline Reasoning Network (TRN) operating in a two-step inductive reasoning process: In the first step model initially answers each question with semantic and syntactic information. The next step chains multiple questions on the same event to predict a timeline, which is then used to ground the answers. Results on the TORQUE and TB-dense, TRC and TRE tasks respectively, demonstrate that TRN outperforms previous methods by effectively resolving the spurious overlaps using the predicted timeline.
ECoRAG: Evidentiality-guided Compression for Long Context RAG
Jun 06, 2025Large Language Models (LLMs) have shown remarkable performance in Open-Domain Question Answering (ODQA) by leveraging external documents through Retrieval-Augmented Generation (RAG). To reduce RAG overhead, from longer context, context compression is necessary. However, prior compression methods do not focus on filtering out non-evidential information, which limit the performance in LLM-based RAG. We thus propose Evidentiality-guided RAG, or ECoRAG framework. ECoRAG improves LLM performance by compressing retrieved documents based on evidentiality, ensuring whether answer generation is supported by the correct evidence. As an additional step, ECoRAG reflects whether the compressed content provides sufficient evidence, and if not, retrieves more until sufficient. Experiments show that ECoRAG improves LLM performance on ODQA tasks, outperforming existing compression methods. Furthermore, ECoRAG is highly cost-efficient, as it not only reduces latency but also minimizes token usage by retaining only the necessary information to generate the correct answer. Code is available at https://github.com/ldilab/ECoRAG.
From Token to Action: State Machine Reasoning to Mitigate Overthinking in Information Retrieval
May 29, 2025Chain-of-Thought (CoT) prompting enables complex reasoning in large language models (LLMs), including applications in information retrieval (IR). However, it often leads to overthinking, where models produce excessively long and semantically redundant traces with little or no benefit. We identify two key challenges in IR: redundant trajectories that revisit similar states and misguided reasoning that diverges from user intent. To address these, we propose State Machine Reasoning (SMR), a transition-based reasoning framework composed of discrete actions (Refine, Rerank, Stop) that support early stopping and fine-grained control. Experiments on the BEIR and BRIGHT benchmarks show that SMR improves retrieval performance (nDCG@10) by 3.4% while reducing token usage by 74.4%. It generalizes across LLMs and retrievers without requiring task-specific tuning, offering a practical alternative to conventional CoT reasoning. The code and details are available at https://github.com/ldilab/SMR.
A highly maneuverable flying squirrel drone with agility-improving foldable wings
Apr 13, 2025



Drones, like most airborne aerial vehicles, face inherent disadvantages in achieving agile flight due to their limited thrust capabilities. These physical constraints cannot be fully addressed through advancements in control algorithms alone. Drawing inspiration from the winged flying squirrel, this paper proposes a highly maneuverable drone equipped with agility-enhancing foldable wings. By leveraging collaborative control between the conventional propeller system and the foldable wings-coordinated through the Thrust-Wing Coordination Control (TWCC) framework-the controllable acceleration set is expanded, enabling the generation of abrupt vertical forces that are unachievable with traditional wingless drones. The complex aerodynamics of the foldable wings are modeled using a physics-assisted recurrent neural network (paRNN), which calibrates the angle of attack (AOA) to align with the real aerodynamic behavior of the wings. The additional air resistance generated by appropriately deploying these wings significantly improves the tracking performance of the proposed "flying squirrel" drone. The model is trained on real flight data and incorporates flat-plate aerodynamic principles. Experimental results demonstrate that the proposed flying squirrel drone achieves a 13.1% improvement in tracking performance, as measured by root mean square error (RMSE), compared to a conventional wingless drone. A demonstration video is available on YouTube: https://youtu.be/O8nrip18azY.
Interventional Speech Noise Injection for ASR Generalizable Spoken Language Understanding
Oct 21, 2024Recently, pre-trained language models (PLMs) have been increasingly adopted in spoken language understanding (SLU). However, automatic speech recognition (ASR) systems frequently produce inaccurate transcriptions, leading to noisy inputs for SLU models, which can significantly degrade their performance. To address this, our objective is to train SLU models to withstand ASR errors by exposing them to noises commonly observed in ASR systems, referred to as ASR-plausible noises. Speech noise injection (SNI) methods have pursued this objective by introducing ASR-plausible noises, but we argue that these methods are inherently biased towards specific ASR systems, or ASR-specific noises. In this work, we propose a novel and less biased augmentation method of introducing the noises that are plausible to any ASR system, by cutting off the non-causal effect of noises. Experimental results and analyses demonstrate the effectiveness of our proposed methods in enhancing the robustness and generalizability of SLU models against unseen ASR systems by introducing more diverse and plausible ASR noises in advance.
Robustifying Multi-hop QA through Pseudo-Evidentiality Training
Jul 07, 2021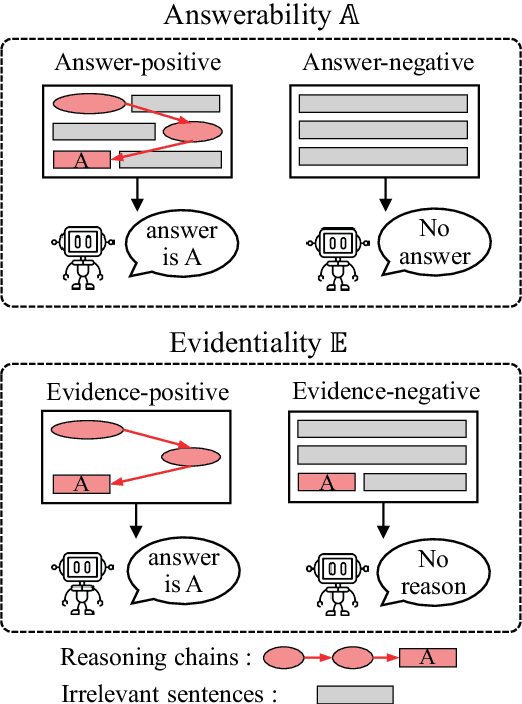
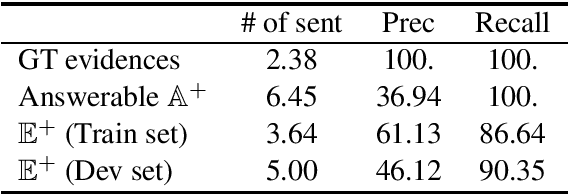
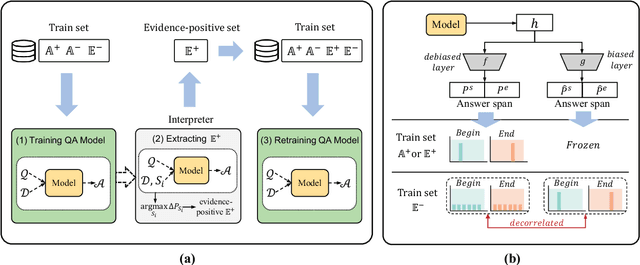
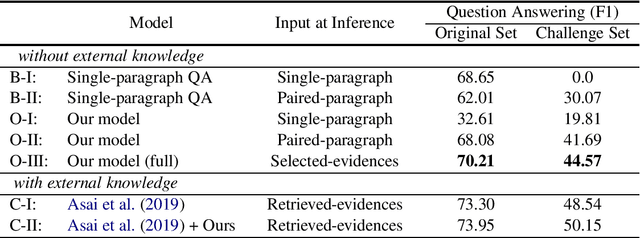
This paper studies the bias problem of multi-hop question answering models, of answering correctly without correct reasoning. One way to robustify these models is by supervising to not only answer right, but also with right reasoning chains. An existing direction is to annotate reasoning chains to train models, requiring expensive additional annotations. In contrast, we propose a new approach to learn evidentiality, deciding whether the answer prediction is supported by correct evidences, without such annotations. Instead, we compare counterfactual changes in answer confidence with and without evidence sentences, to generate "pseudo-evidentiality" annotations. We validate our proposed model on an original set and challenge set in HotpotQA, showing that our method is accurate and robust in multi-hop reasoning.