 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrone Carry-on Weight and Wind Flow Assessment via Micro-Doppler Analysis
Oct 26, 2025Remote monitoring of drones has become a global objective due to emerging applications in national security and managing aerial delivery traffic. Despite their relatively small size, drones can carry significant payloads, which require monitoring, especially in cases of unauthorized transportation of dangerous goods. A drone's flight dynamics heavily depend on outdoor wind conditions and the carry-on weight, which affect the tilt angle of a drone's body and the rotation velocity of the blades. A surveillance radar can capture both effects, provided a sufficient signal-to-noise ratio for the received echoes and an adjusted postprocessing detection algorithm. Here, we conduct a systematic study to demonstrate that micro-Doppler analysis enables the disentanglement of the impacts of wind and weight on a hovering drone. The physics behind the effect is related to the flight controller, as the way the drone counteracts weight and wind differs. When the payload is balanced, it imposes an additional load symmetrically on all four rotors, causing them to rotate faster, thereby generating a blade-related micro-Doppler shift at a higher frequency. However, the impact of the wind is different. The wind attempts to displace the drone, and to counteract this, the drone tilts to the side. As a result, the forward and rear rotors rotate at different velocities to maintain the tilt angle of the drone body relative to the airflow direction. This causes the splitting in the micro-Doppler spectra. By performing a set of experiments in a controlled environment, specifically, an anechoic chamber for electromagnetic isolation and a wind tunnel for imposing deterministic wind conditions, we demonstrate that both wind and payload details can be extracted using a simple deterministic algorithm based on branching in the micro-Doppler spectra.
Broadband Radar Invisibility with Time-Dependent Metasurfaces
Apr 20, 2021
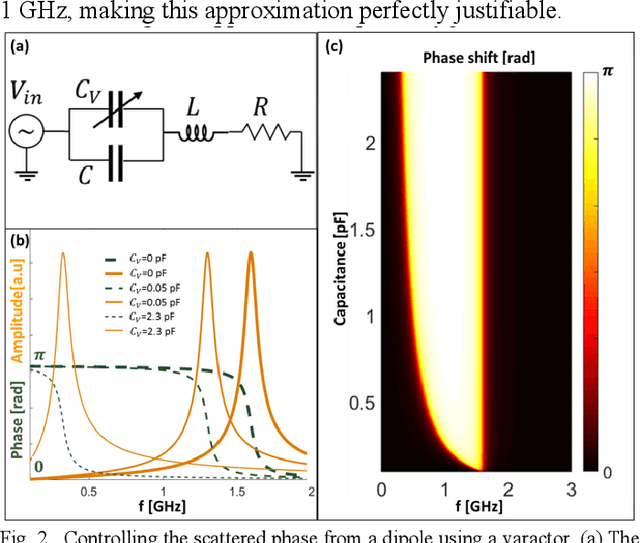
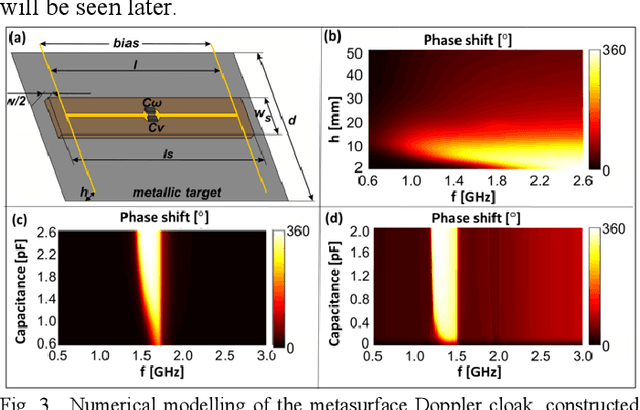
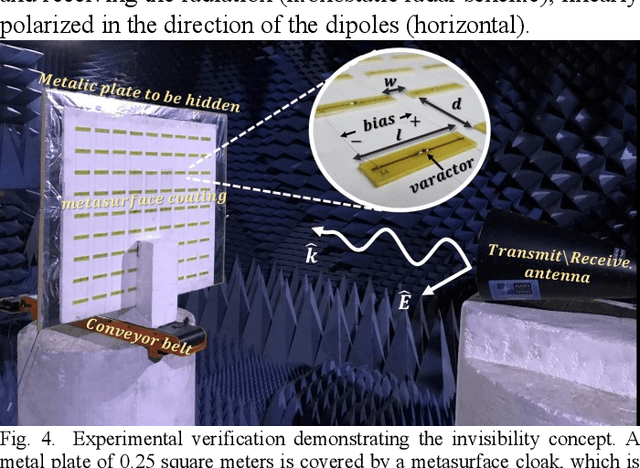
Concealing objects from interrogation has been a primary objective since the integration of radars into surveillance systems. Metamaterial-based invisibility cloaking, which was considered a promising solution, did not yet succeed in delivering reliable performance against real radar systems, mainly due to its narrow operational bandwidth. Here we propose an approach, which addresses the issue from a signal-processing standpoint and, as a result, is capable of coping with the vast majority of unclassified radar systems by exploiting vulnerabilities in their design. In particular, we demonstrate complete concealment of a 0.25 square meter moving metal plate from an investigating radar system, operating in a broad frequency range approaching 20% bandwidth around the carrier of 1.5GHz. The key element of the radar countermeasure is a temporally modulated coating. This auxiliary structure is designed to dynamically and controllably adjust the reflected phase of the impinging radar signal, which acquires a user-defined Doppler shift. A special case of interest is imposing a frequency shift that compensates for the real Doppler signatures originating from the motion of the target. In this case the radar will consider the target static, even though it is moving. As a result, the reflected echo will be discarded by the clutter removal filter, which is an inherent part of any modern radar system that is designed to operate in real conditions. This signal-processing loophole allows rendering the target invisible to the radar even though it scatters electromagnetic radiation. This application claims the benefit of patent number 273995, filed on April 16 2020.