 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Spinning Blimp: Design and Control of a Novel Minimalist Aerial Vehicle Leveraging Rotational Dynamics and Locomotion
Mar 06, 2025This paper presents the Spinning Blimp, a novel lighter-than-air (LTA) aerial vehicle designed for low-energy stable flight. Utilizing an oblate spheroid helium balloon for buoyancy, the vehicle achieves minimal energy consumption while maintaining prolonged airborne states. The unique and low-cost design employs a passively arranged wing coupled with a propeller to induce a spinning behavior, providing inherent pendulum-like stabilization. We propose a control strategy that takes advantage of the continuous revolving nature of the spinning blimp to control translational motion. The cost-effectiveness of the vehicle makes it highly suitable for a variety of applications, such as patrolling, localization, air and turbulence monitoring, and domestic surveillance. Experimental evaluations affirm the design's efficacy and underscore its potential as a versatile and economically viable solution for aerial applications.
MochiSwarm: A testbed for robotic blimps in realistic environments
Mar 05, 2025Testing aerial robots in tasks such as pickup-and-delivery and surveillance significantly benefits from high energy efficiency and scalability of the deployed robotic system. This paper presents MochiSwarm, an open-source testbed of light-weight robotic blimps, ready for multi-robot operation without external localization. We introduce the system design in hardware, software, and perception, which capitalizes on modularity, low cost, and light weight. The hardware allows for rapid modification, which enables the integration of additional sensors to enhance autonomy for different scenarios. The software framework supports different actuation models and communication between the base station and multiple blimps. The detachable perception module allows independent blimps to perform tasks that involve detection and autonomous actuation. We showcase a differential-drive module as an example, of which the autonomy is enabled by visual servoing using the perception module. A case study of pickup-and-delivery tasks with up to 12 blimps highlights the autonomy of the MochiSwarm without external infrastructures.
A Novel Low-Cost, Recyclable, Easy-to-Build Robot Blimp For Transporting Supplies in Hard-to-Reach Locations
Sep 13, 2023



Rural communities in remote areas often encounter significant challenges when it comes to accessing emergency healthcare services and essential supplies due to a lack of adequate transportation infrastructure. The situation is further exacerbated by poorly maintained, damaged, or flooded roads, making it arduous for rural residents to obtain the necessary aid in critical situations. Limited budgets and technological constraints pose additional obstacles, hindering the prompt response of local rescue teams during emergencies. The transportation of crucial resources, such as medical supplies and food, plays a vital role in saving lives in these situations. In light of these obstacles, our objective is to improve accessibility and alleviate the suffering of vulnerable populations by automating transportation tasks using low-cost robotic systems. We propose a low-cost, easy-to-build blimp robot (UAVs), that can significantly enhance the efficiency and effectiveness of local emergency responses.
Forming and Controlling Hitches in Midair Using Aerial Robots
Mar 13, 2023



The use of cables for aerial manipulation has shown to be a lightweight and versatile way to interact with objects. However, fastening objects using cables is still a challenge and human is required. In this work, we propose a novel way to secure objects using hitches. The hitch can be formed and morphed in midair using a team of aerial robots with cables. The hitch's shape is modeled as a convex polygon, making it versatile and adaptable to a wide variety of objects. We propose an algorithm to form the hitch systematically. The steps can run in parallel, allowing hitches with a large number of robots to be formed in constant time. We develop a set of actions that include different actions to change the shape of the hitch. We demonstrate our methods using a team of aerial robots via simulation and actual experiments.
Folding Knots Using a Team of Aerial Robots
Aug 02, 2022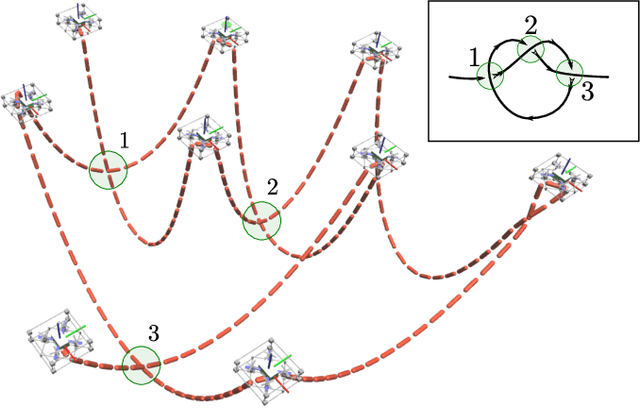
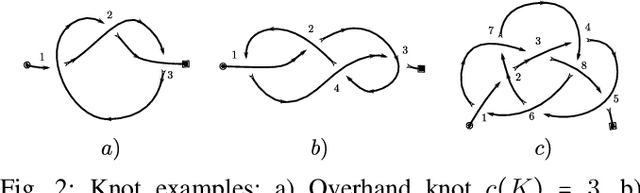
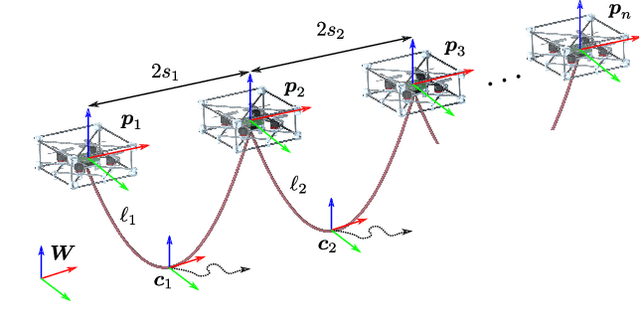
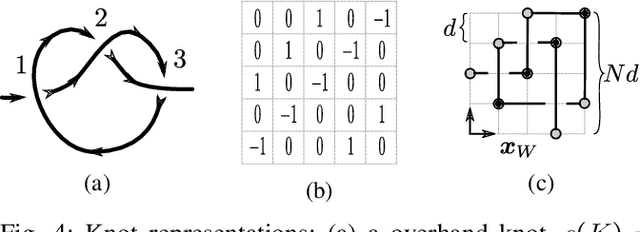
From ancient times, humans have been using cables and ropes to tie, carry, and manipulate objects by folding knots. However, automating knot folding is challenging because it requires dexterity to move a cable over and under itself. In this paper, we propose a method to fold knots in midair using a team of aerial vehicles. We take advantage of the fact that vehicles are able to fly in between cable segments without any re-grasping. So the team grasps the cable from the floor, and releases it once the knot is folded. Based on a composition of catenary curves, we simplify the complexity of dealing with an infinite-dimensional configuration space of the cable, and formally propose a new knot representation. Such representation allows us to design a trajectory that can be used to fold knots using a leader-follower approach. We show that our method works for different types of knots in simulations. Additionally, we show that our solution is also computationally efficient and can be executed in real-time.
Modular Multi-Rotors: From Quadrotors to Fully-Actuated Aerial Vehicles
Feb 01, 2022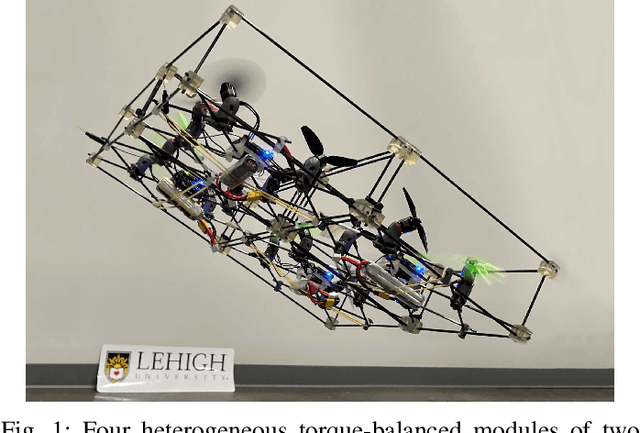
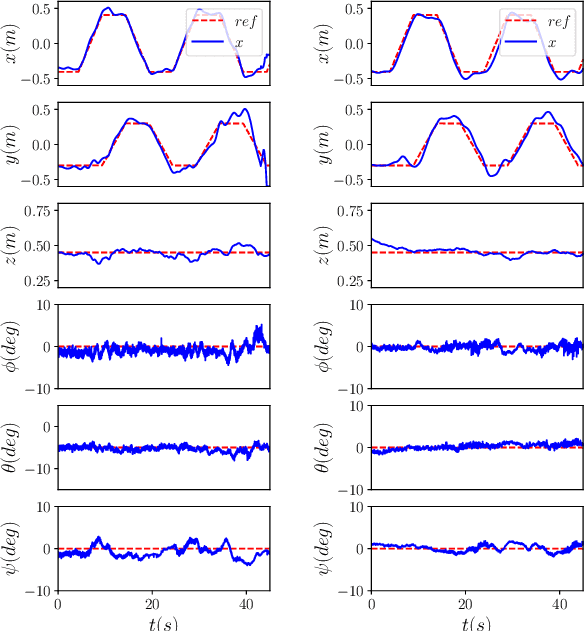
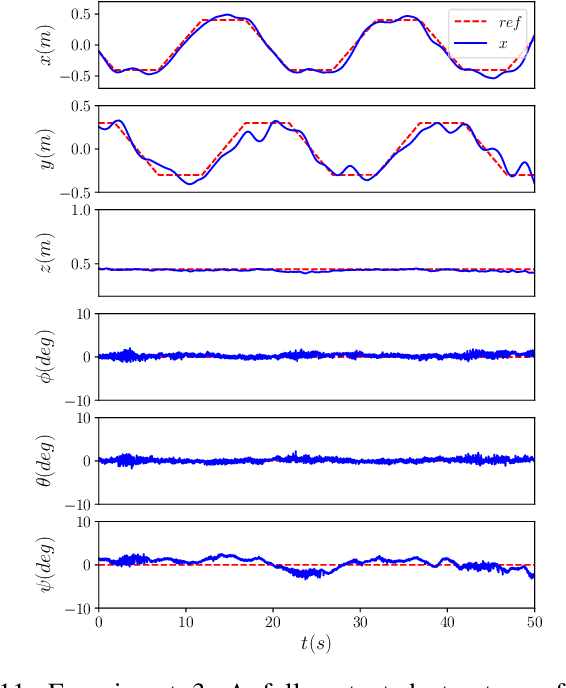
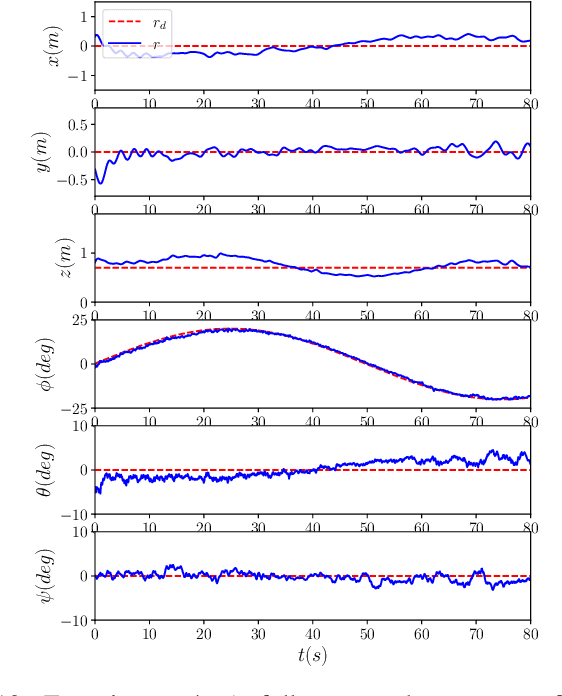
Traditional aerial vehicles have specific characteristics to perform specific tasks. For instance, in aerial transportation, the vehicles are limited with a maximum payload that cannot be extended to transport heavier objects. We propose a versatile modular robotic system that can increase its payload and controllable degrees of freedom by reconfiguring heterogeneous modules; we call it H-ModQuad. The system consists of cuboid modules, propelled by quadrotors with tilted propellers that can generate forces in different directions. We present two module designs with different actuation properties that enhance the capabilities of the assembled robot. By assembling different types of modules, H-ModQuad can increase its controllable degrees of freedom from 4 to 5 and 6 depending on its configuration. We model the modular vehicle and propose a general control strategy for all possible numbers of controllable degrees of freedom. We extend the concept of the actuation ellipsoid to find the best reference orientation that can maximize the performance of the structure. Our approach is validated with experiments using actual robots, showing that the structure can perform independent actuation for rotation and translation.
Non-Prehensile Manipulation of Cuboid Objects Using a Catenary Robot
Aug 03, 2021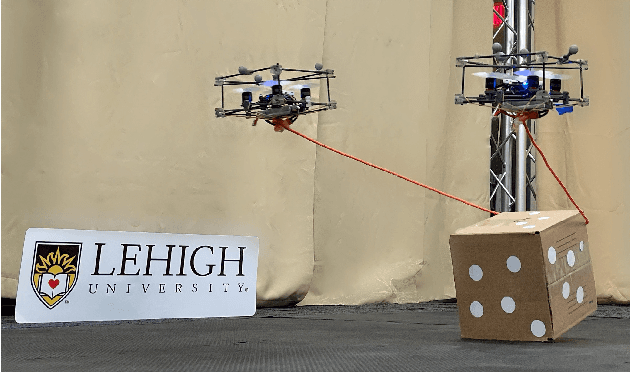
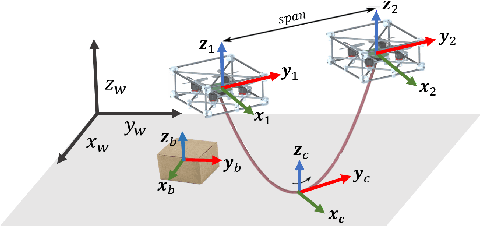

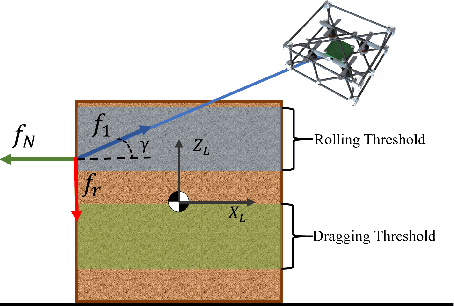
Transporting objects using quadrotors with cables has been widely studied in the literature. However, most of those approaches assume that the cables are previously attached to the load by human intervention. In tasks where multiple objects need to be moved, the efficiency of the robotic system is constrained by the requirement of manual labor. Our approach uses a non-stretchable cable connected to two quadrotors, which we call the catenary robot, that fully automates the transportation task. Using the cable, we can roll and drag the cuboid object (box) on planar surfaces. Depending on the surface type, we choose the proper action, dragging for low friction, and rolling for high friction. Therefore, the transportation process does not require any human intervention as we use the cable to interact with the box without requiring fastening. We validate our control design in simulation and with actual robots, where we show them rolling and dragging boxes to track desired trajectories.
H-ModQuad: Modular Multi-Rotors with 4, 5, and 6 Controllable DOF
Jun 08, 2021
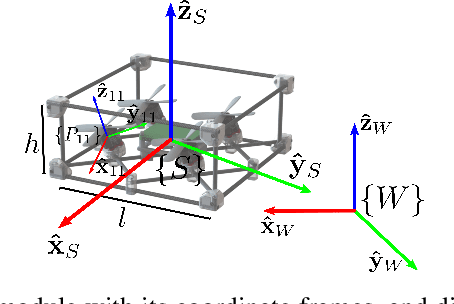
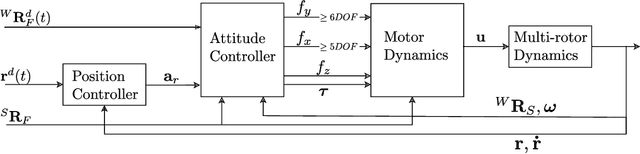
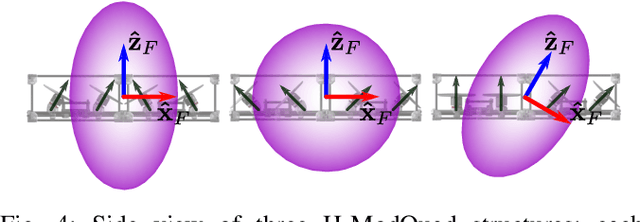
Traditional aerial vehicles are usually custom-designed for specific tasks. Although they offer an efficient solution, they are not always able to adapt to changes in the task specification, e.g., increasing the payload. This applies to quadrotors, having a maximum payload and only four controllable degrees of freedom, limiting their adaptability to the task's variations. We propose a versatile modular robotic system that can increase its payload and degrees of freedom by assembling heterogeneous modules; we call it H-ModQuad. It consists of cuboid modules propelled by quadrotors with tilted propellers that can generate forces in different directions. By connecting different types of modules, an H-ModQuad can increase its controllable degrees of freedom from 4 to 5 and 6. We model the general structure and propose three controllers, one for each number of controllable degrees of freedom. We extend the concept of the actuation ellipsoid to find the best reference orientation that can maximize the performance of the structure. Our approach is validated with experiments using actual robots, showing the independence of the translation and orientation of a structure.