 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControlling by Showing: i-Mimic: A Video-based Method to Control Robotic Arms
Jan 27, 2021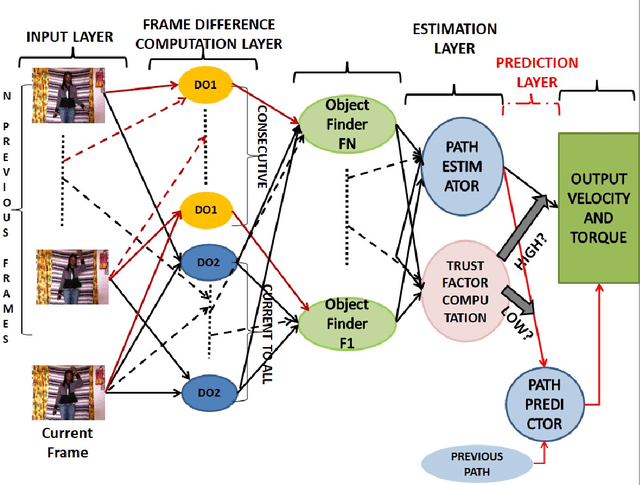
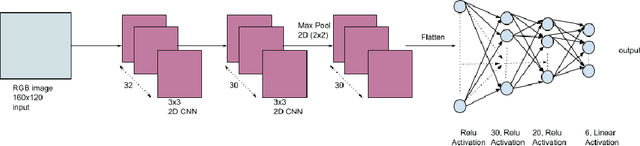
A novel concept of vision-based intelligent control of robotic arms is developed here in this work. This work enables the controlling of robotic arms motion only with visual inputs, that is, controlling by showing the videos of correct movements. This work can broadly be sub-divided into two segments. The first part of this work is to develop an unsupervised vision-based method to control robotic arm in 2-D plane, and the second one is with deep CNN in the same task in 3-D plane. The first method is unsupervised, where our aim is to perform mimicking of human arm motion in real-time by a manipulator. We developed a network, namely the vision-to-motion optical network (DON), where the input should be a video stream containing hand movements of human, the the output would be out the velocity and torque information of the hand movements shown in the videos. The output information of the DON is then fed to the robotic arm by enabling it to generate motion according to the real hand videos. The method has been tested with both live-stream video feed as well as on recorded video obtained from a monocular camera even by intelligently predicting the trajectory of human hand hand when it gets occluded. This is why the mimicry of the arm incorporates some intelligence to it and becomes intelligent mimic (i-mimic). Alongside the unsupervised method another method has also been developed deploying the deep neural network technique with CNN (Convolutional Neural Network) to perform the mimicking, where labelled datasets are used for training. The same dataset, as used in the unsupervised DON-based method, is used in the deep CNN method, after manual annotations. Both the proposed methods are validated with off-line as well as with on-line video datasets in real-time. The entire methodology is validated with real-time 1-link and simulated n-link manipulators alongwith suitable comparisons.
COLLIDE-PRED: Prediction of On-Road Collision From Surveillance Videos
Jan 21, 2021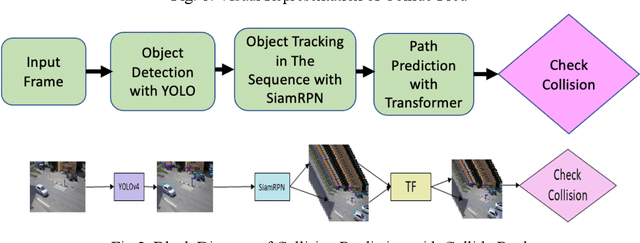
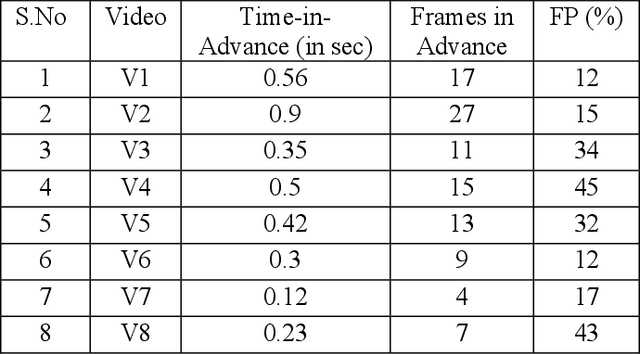
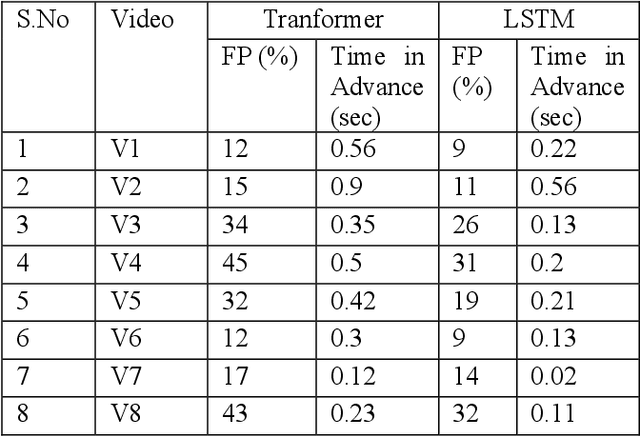
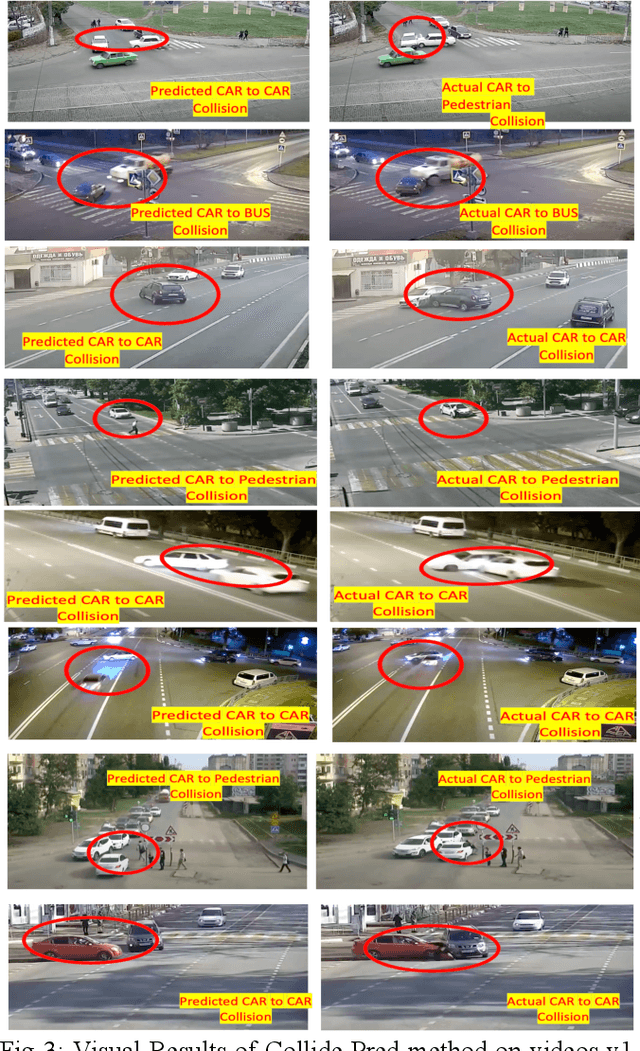
Predicting on-road abnormalities such as road accidents or traffic violations is a challenging task in traffic surveillance. If such predictions can be done in advance, many damages can be controlled. Here in our wok, we tried to formulate a solution for automated collision prediction in traffic surveillance videos with computer vision and deep networks. It involves object detection, tracking, trajectory estimation, and collision prediction. We propose an end-to-end collision prediction system, named as COLLIDE-PRED, that intelligently integrates the information of past and future trajectories of moving objects to predict collisions in videos. It is a pipeline that starts with object detection, which is used for object tracking, and then trajectory prediction is performed which concludes by collision detection. The probable place of collision, and the objects those may cause the collision, both can be identified correctly with COLLIDE-PRED. The proposed method is experimentally validated with a number of different videos and proves to be effective in identifying accident in advance.