 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocal Preferential Bayesian Optimization
Jun 01, 2026Bayesian optimization (BO) is a popular and effective approach for tuning expensive, noisy experiments, but requires the formulation of an explicit objective function. Preferential BO (PBO) removes this requirement by learning from pairwise human feedback, yet existing methods struggle to efficiently optimize beyond low- and medium-dimensional problems due to their global search approaches. We address this limitation by developing a family of local PBO methods that transfer key ideas from high-dimensional BO to the preferential setting. In particular, we introduce local PBO methods which adapt trust-region and derivative-informed local search to pairwise preference feedback, where the latter exploits first- and second-order derivatives of the Laplace-approximated GP posterior. Our benchmark on GP sample paths, standard optimization benchmark functions, and policy-search tasks shows that local PBO methods are especially effective in high-dimensional and complex landscapes with steep optima. Compared with global preference-based baselines, they can substantially reduce cumulative regret, making them particularly useful for real-world preference-based optimization tasks such as policy search.
Preferential Bayesian Optimization with Crash Feedback
Apr 02, 2026Bayesian optimization is a popular black-box optimization method for parameter learning in control and robotics. It typically requires an objective function that reflects the user's optimization goal. However, in practical applications, this objective function is often inaccessible due to complex or unmeasurable performance metrics. Preferential Bayesian optimization (PBO) overcomes this limitation by leveraging human feedback through pairwise comparisons, eliminating the need for explicit performance quantification. When applying PBO to hardware systems, such as in quadcopter control, crashes can cause time-consuming experimental resets, wear and tear, or otherwise undesired outcomes. Standard PBO methods cannot incorporate feedback from such crashed experiments, resulting in the exploration of parameters that frequently lead to experimental crashes. We thus introduce CrashPBO, a user-friendly mechanism that enables users to both express preferences and report crashes during the optimization process. Benchmarking on synthetic functions shows that this mechanism reduces crashes by 63% and increases data efficiency. Through experiments on three robotics platforms, we demonstrate the wide applicability and transferability of CrashPBO, highlighting that it provides a flexible, user-friendly framework for parameter learning with human feedback on preferences and crashes.
Sailing Towards Zero-Shot State Estimation using Foundation Models Combined with a UKF
Sep 04, 2025State estimation in control and systems engineering traditionally requires extensive manual system identification or data-collection effort. However, transformer-based foundation models in other domains have reduced data requirements by leveraging pre-trained generalist models. Ultimately, developing zero-shot foundation models of system dynamics could drastically reduce manual deployment effort. While recent work shows that transformer-based end-to-end approaches can achieve zero-shot performance on unseen systems, they are limited to sensor models seen during training. We introduce the foundation model unscented Kalman filter (FM-UKF), which combines a transformer-based model of system dynamics with analytically known sensor models via an UKF, enabling generalization across varying dynamics without retraining for new sensor configurations. We evaluate FM-UKF on a new benchmark of container ship models with complex dynamics, demonstrating a competitive accuracy, effort, and robustness trade-off compared to classical methods with approximate system knowledge and to an end-to-end approach. The benchmark and dataset are open sourced to further support future research in zero-shot state estimation via foundation models.
Local Bayesian Optimization for Controller Tuning with Crash Constraints
Nov 25, 2024Controller tuning is crucial for closed-loop performance but often involves manual adjustments. Although Bayesian optimization (BO) has been established as a data-efficient method for automated tuning, applying it to large and high-dimensional search spaces remains challenging. We extend a recently proposed local variant of BO to include crash constraints, where the controller can only be successfully evaluated in an a-priori unknown feasible region. We demonstrate the efficiency of the proposed method through simulations and hardware experiments. Our findings showcase the potential of local BO to enhance controller performance and reduce the time and resources necessary for tuning.
* Published in at-Automatisierungstechnik
Multi-Objective Optimization of a Path-following MPC for Vehicle Guidance: A Bayesian Optimization Approach
Apr 08, 2021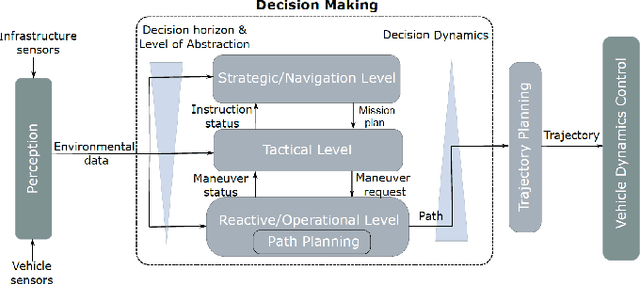
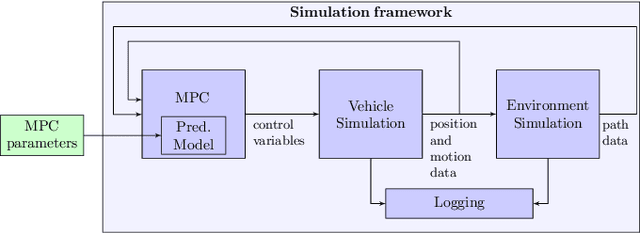
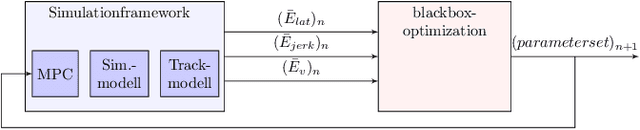
This paper tackles the multi-objective optimization of the cost functional of a path-following model predictive control for vehicle longitudinal and lateral control. While the inherent optimal character of the model predictive control and the direct consideration of constraints gives a very powerful tool for many applications, is the determination of an appropriate cost functional a non-trivial task. This results on the one hand from the number of degrees of freedom or the multitude of adjustable parameters and on the other hand from the coupling of these. To overcome this situation a Bayesian optimization procedure is present, which gives the possibility to determine optimal cost functional parameters for a given desire. Moreover, a Pareto-front for a whole set of possible configurations can be computed.