 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconciling distributed compliance with high-performance control in continuum soft robotics
Mar 17, 2026High-performance closed-loop control of truly soft continuum manipulators has remained elusive. Experimental demonstrations have largely relied on sufficiently stiff, piecewise architectures in which each actuated segment behaves as a distributed yet effectively rigid element, while deformation modes beyond simple bending are suppressed. This strategy simplifies modeling and control, but sidesteps the intrinsic complexity of a fully compliant body and makes the system behave as a serial kinematic chain, much like a conventional articulated robot. An implicit conclusion has consequently emerged within the community: distributed softness and dynamic precision are incompatible. Here we show this trade-off is not fundamental. We present a highly compliant, fully continuum robotic arm - without hardware discretization or stiffness-based mode suppression - that achieves fast, precise task-space convergence under dynamic conditions. The platform integrates direct-drive actuation, a tendon routing scheme enabling coupled bending and twisting, and a structured nonlinear control architecture grounded in reduced-order strain modeling of underactuated systems. Modeling, actuation, and control are co-designed to preserve essential mechanical complexity while enabling high-bandwidth loop closure. Experiments demonstrate accurate, repeatable execution of dynamic Cartesian tasks, including fast positioning and interaction. The proposed system achieves the fastest reported task-execution speed among soft robots. At millimetric precision, execution speed increases nearly fourfold compared with prior approaches, while operating on a fully compliant continuum body. These results show that distributed compliance and high-performance dynamic control can coexist, opening a path toward truly soft manipulators approaching the operational capabilities of rigid robots without sacrificing morphological richness.
How ornithopters can perch autonomously on a branch
Jul 15, 2022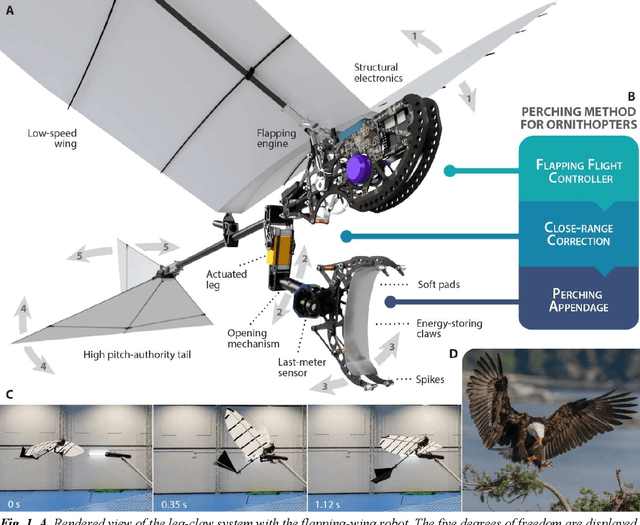
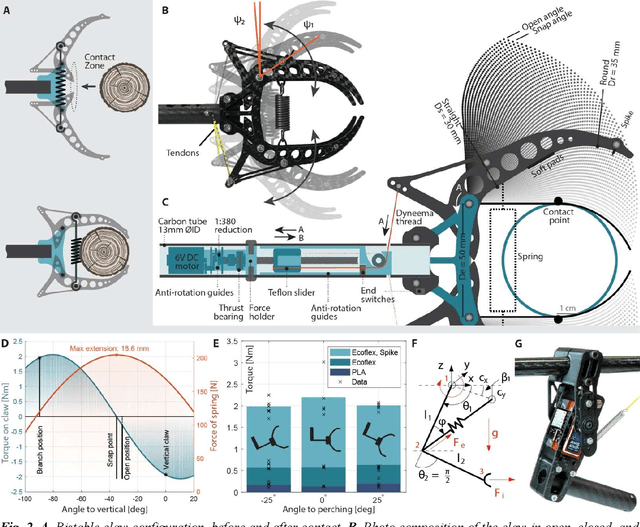
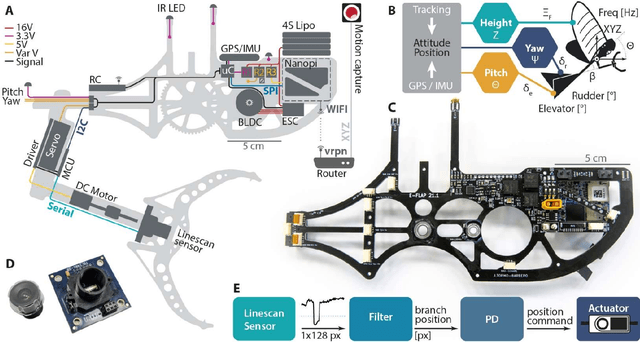
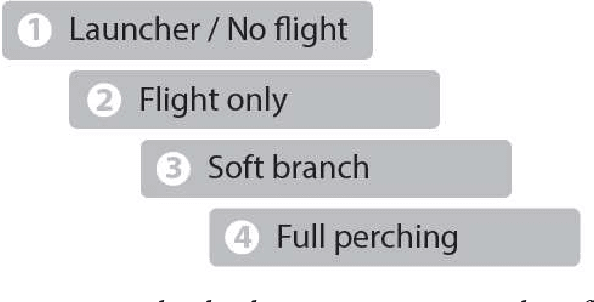
Flapping wings are a bio-inspired method to produce lift and thrust in aerial robots, leading to quiet and efficient motion. The advantages of this technology are safety and maneuverability, and physical interaction with the environment, humans, and animals. However, to enable substantial applications, these robots must perch and land. Despite recent progress in the perching field, flapping-wing vehicles, or ornithopters, are to this day unable to stop their flight on a branch. In this paper, we present a novel method that defines a process to reliably and autonomously land an ornithopter on a branch. This method describes the joint operation of a flapping-flight controller, a close-range correction system and a passive claw appendage. Flight is handled by a triple pitch-yaw-altitude controller and integrated body electronics, permitting perching at 3 m/s. The close-range correction system, with fast optical branch sensing compensates for position misalignment when landing. This is complemented by a passive bistable claw design can lock and hold 2 Nm of torque, grasp within 25 ms and can re-open thanks to an integrated tendon actuation. The perching method is supplemented by a four-step experimental development process which optimizes for a successful design. We validate this method with a 700 g ornithopter and demonstrate the first autonomous perching flight of a flapping-wing robot on a branch, a result replicated with a second robot. This work paves the way towards the application of flapping-wing robots for long-range missions, bird observation, manipulation, and outdoor flight.