 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Low-Cost Teleoperation: Augmenting GELLO with Force
Jul 18, 2025



In this work we extend the low-cost GELLO teleoperation system, initially designed for joint position control, with additional force information. Our first extension is to implement force feedback, allowing users to feel resistance when interacting with the environment. Our second extension is to add force information into the data collection process and training of imitation learning models. We validate our additions by implementing these on a GELLO system with a Franka Panda arm as the follower robot, performing a user study, and comparing the performance of policies trained with and without force information on a range of simulated and real dexterous manipulation tasks. Qualitatively, users with robotics experience preferred our controller, and the addition of force inputs improved task success on the majority of tasks.
A Pragmatic Look at Deep Imitation Learning
Aug 04, 2021
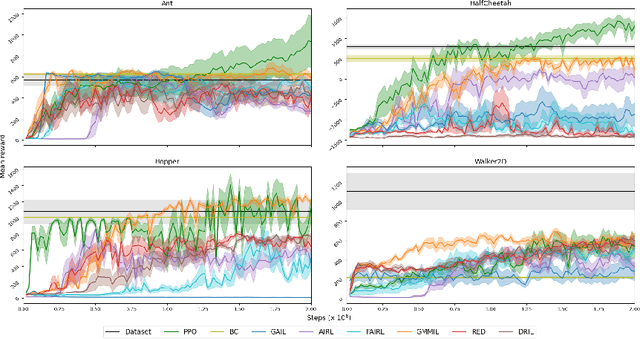
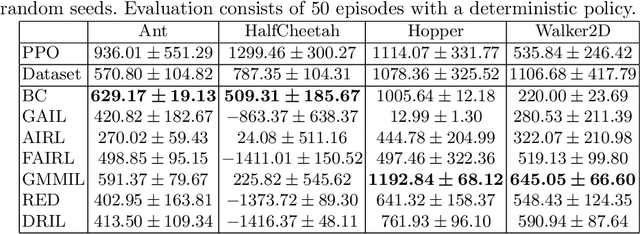
The introduction of the generative adversarial imitation learning (GAIL) algorithm has spurred the development of scalable imitation learning approaches using deep neural networks. The GAIL objective can be thought of as 1) matching the expert policy's state distribution; 2) penalising the learned policy's state distribution; and 3) maximising entropy. While theoretically motivated, in practice GAIL can be difficult to apply, not least due to the instabilities of adversarial training. In this paper, we take a pragmatic look at GAIL and related imitation learning algorithms. We implement and automatically tune a range of algorithms in a unified experimental setup, presenting a fair evaluation between the competing methods. From our results, our primary recommendation is to consider non-adversarial methods. Furthermore, we discuss the common components of imitation learning objectives, and present promising avenues for future research.