 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle Image Depth Estimation: An Overview
Apr 13, 2021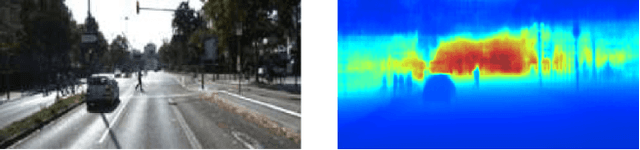
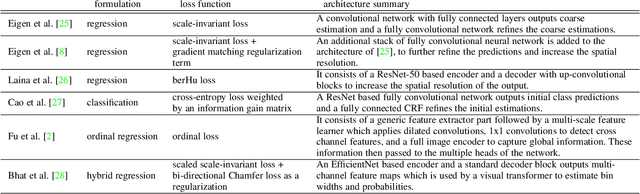
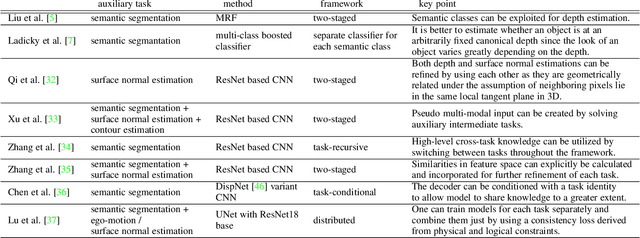
We review solutions to the problem of depth estimation, arguably the most important subtask in scene understanding. We focus on the single image depth estimation problem. Due to its properties, the single image depth estimation problem is currently best tackled with machine learning methods, most successfully with convolutional neural networks. We provide an overview of the field by examining key works. We examine non-deep learning approaches that mostly predate deep learning and utilize hand-crafted features and assumptions, and more recent works that mostly use deep learning techniques. The single image depth estimation problem is tackled first in a supervised fashion with absolute or relative depth information acquired from human or sensor-labeled data, or in an unsupervised way using unlabelled stereo images or video datasets. We also study multitask approaches that combine the depth estimation problem with related tasks such as semantic segmentation and surface normal estimation. Finally, we discuss investigations into the mechanisms, principles, and failure cases of contemporary solutions.
A New Distributional Ranking Loss With Uncertainty: Illustrated in Relative Depth Estimation
Oct 14, 2020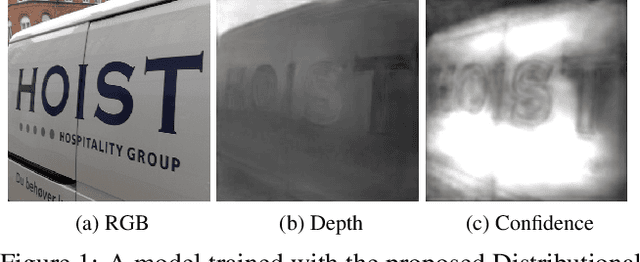
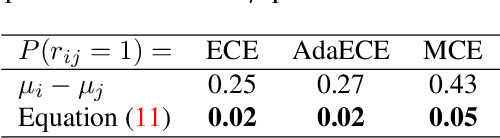
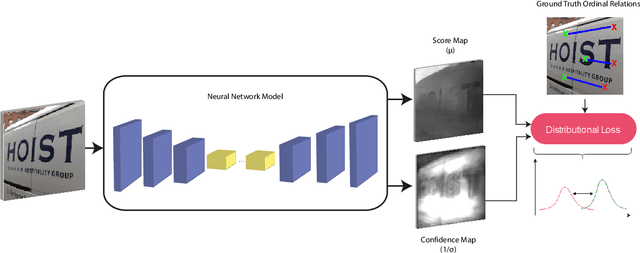
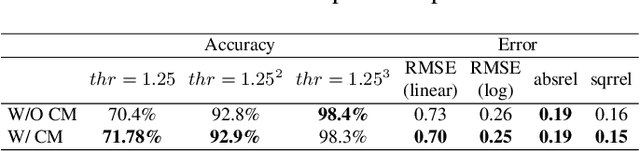
We propose a new approach for the problem of relative depth estimation from a single image. Instead of directly regressing over depth scores, we formulate the problem as estimation of a probability distribution over depth and aim to learn the parameters of the distributions which maximize the likelihood of the given data. To train our model, we propose a new ranking loss, Distributional Loss, which tries to increase the probability of farther pixel's depth being greater than the closer pixel's depth. Our proposed approach allows our model to output confidence in its estimation in the form of standard deviation of the distribution. We achieve state of the art results against a number of baselines while providing confidence in our estimations. Our analysis show that estimated confidence is actually a good indicator of accuracy. We investigate the usage of confidence information in a downstream task of metric depth estimation, to increase its performance.
Relative Depth Estimation as a Ranking Problem
Oct 14, 2020
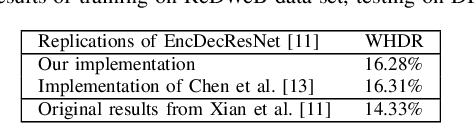
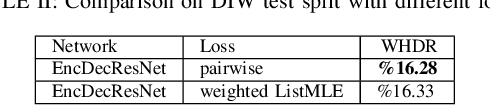
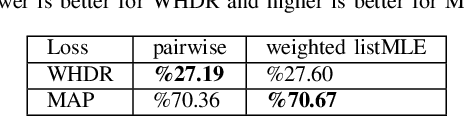
We present a formulation of the relative depth estimation from a single image problem, as a ranking problem. By reformulating the problem this way, we were able to utilize literature on the ranking problem, and apply the existing knowledge to achieve better results. To this end, we have introduced a listwise ranking loss borrowed from ranking literature, weighted ListMLE, to the relative depth estimation problem. We have also brought a new metric which considers pixel depth ranking accuracy, on which our method is stronger.
Integration of 3D Object Recognition and Planning for Robotic Manipulation: A Preliminary Report
Jul 29, 2013
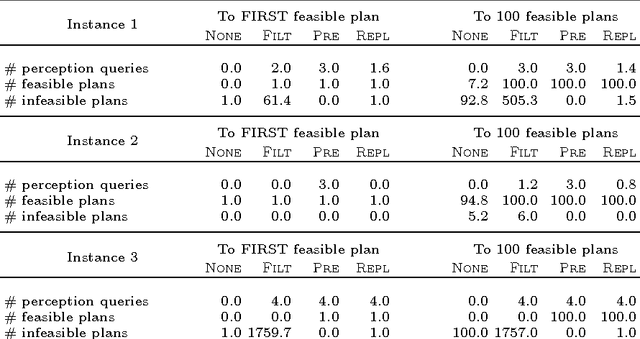
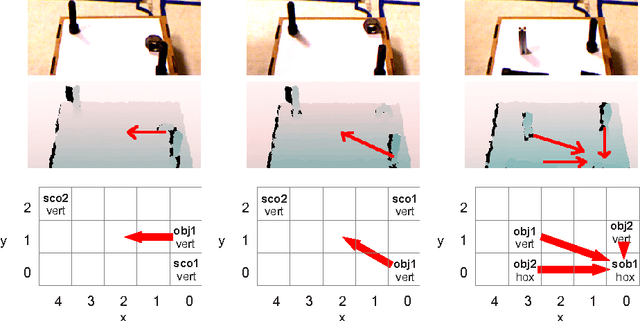
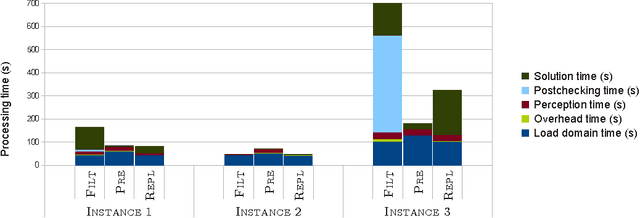
We investigate different approaches to integrating object recognition and planning in a tabletop manipulation domain with the set of objects used in the 2012 RoboCup@Work competition. Results of our preliminary experiments show that, with some approaches, close integration of perception and planning improves the quality of plans, as well as the computation times of feasible plans.