 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFaceCLIPNeRF: Text-driven 3D Face Manipulation using Deformable Neural Radiance Fields
Aug 07, 2023



As recent advances in Neural Radiance Fields (NeRF) have enabled high-fidelity 3D face reconstruction and novel view synthesis, its manipulation also became an essential task in 3D vision. However, existing manipulation methods require extensive human labor, such as a user-provided semantic mask and manual attribute search unsuitable for non-expert users. Instead, our approach is designed to require a single text to manipulate a face reconstructed with NeRF. To do so, we first train a scene manipulator, a latent code-conditional deformable NeRF, over a dynamic scene to control a face deformation using the latent code. However, representing a scene deformation with a single latent code is unfavorable for compositing local deformations observed in different instances. As so, our proposed Position-conditional Anchor Compositor (PAC) learns to represent a manipulated scene with spatially varying latent codes. Their renderings with the scene manipulator are then optimized to yield high cosine similarity to a target text in CLIP embedding space for text-driven manipulation. To the best of our knowledge, our approach is the first to address the text-driven manipulation of a face reconstructed with NeRF. Extensive results, comparisons, and ablation studies demonstrate the effectiveness of our approach.
Local 3D Editing via 3D Distillation of CLIP Knowledge
Jun 21, 2023



3D content manipulation is an important computer vision task with many real-world applications (e.g., product design, cartoon generation, and 3D Avatar editing). Recently proposed 3D GANs can generate diverse photorealistic 3D-aware contents using Neural Radiance fields (NeRF). However, manipulation of NeRF still remains a challenging problem since the visual quality tends to degrade after manipulation and suboptimal control handles such as 2D semantic maps are used for manipulations. While text-guided manipulations have shown potential in 3D editing, such approaches often lack locality. To overcome these problems, we propose Local Editing NeRF (LENeRF), which only requires text inputs for fine-grained and localized manipulation. Specifically, we present three add-on modules of LENeRF, the Latent Residual Mapper, the Attention Field Network, and the Deformation Network, which are jointly used for local manipulations of 3D features by estimating a 3D attention field. The 3D attention field is learned in an unsupervised way, by distilling the zero-shot mask generation capability of CLIP to the 3D space with multi-view guidance. We conduct diverse experiments and thorough evaluations both quantitatively and qualitatively.
* conference: CVPR 2023
WaveBound: Dynamic Error Bounds for Stable Time Series Forecasting
Oct 25, 2022



Time series forecasting has become a critical task due to its high practicality in real-world applications such as traffic, energy consumption, economics and finance, and disease analysis. Recent deep-learning-based approaches have shown remarkable success in time series forecasting. Nonetheless, due to the dynamics of time series data, deep networks still suffer from unstable training and overfitting. Inconsistent patterns appearing in real-world data lead the model to be biased to a particular pattern, thus limiting the generalization. In this work, we introduce the dynamic error bounds on training loss to address the overfitting issue in time series forecasting. Consequently, we propose a regularization method called WaveBound which estimates the adequate error bounds of training loss for each time step and feature at each iteration. By allowing the model to focus less on unpredictable data, WaveBound stabilizes the training process, thus significantly improving generalization. With the extensive experiments, we show that WaveBound consistently improves upon the existing models in large margins, including the state-of-the-art model.
Residual Correction in Real-Time Traffic Forecasting
Sep 12, 2022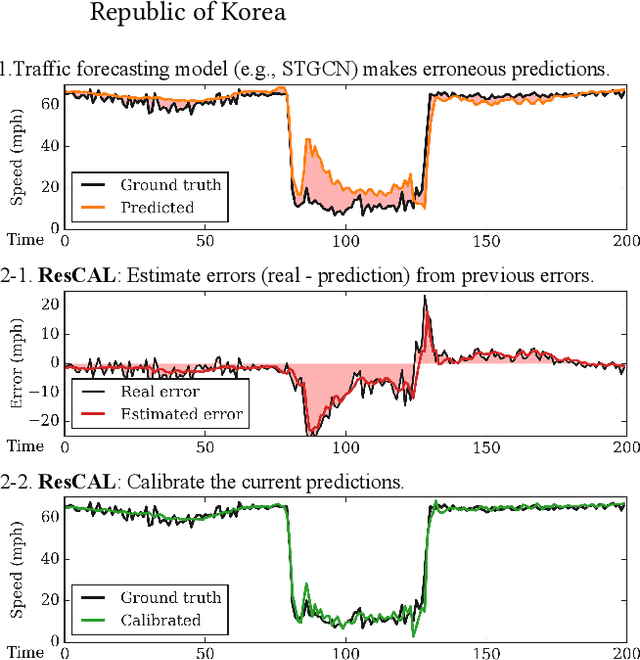
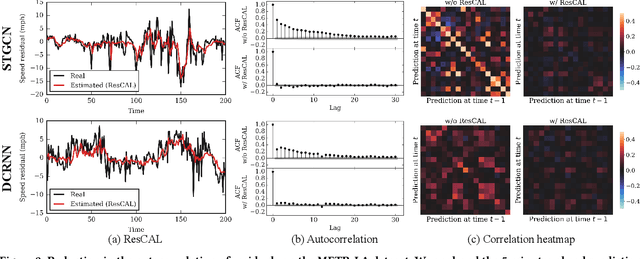
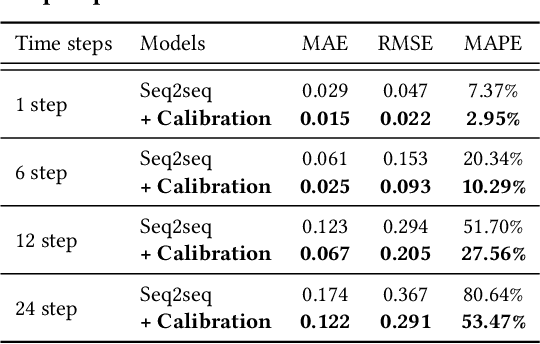
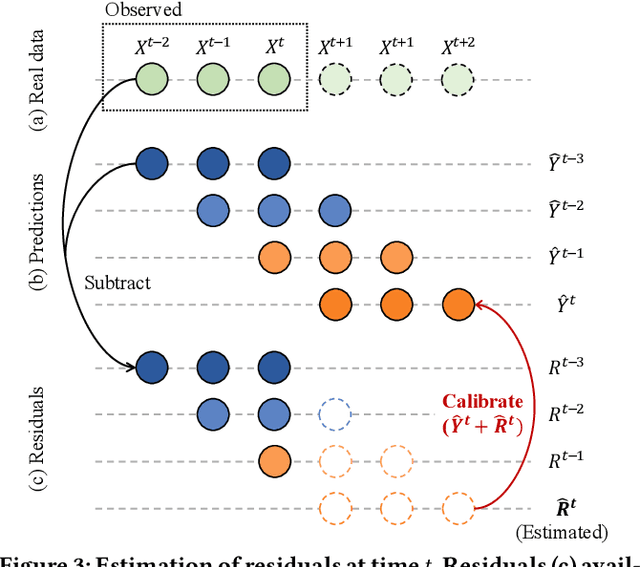
Predicting traffic conditions is tremendously challenging since every road is highly dependent on each other, both spatially and temporally. Recently, to capture this spatial and temporal dependency, specially designed architectures such as graph convolutional networks and temporal convolutional networks have been introduced. While there has been remarkable progress in traffic forecasting, we found that deep-learning-based traffic forecasting models still fail in certain patterns, mainly in event situations (e.g., rapid speed drops). Although it is commonly accepted that these failures are due to unpredictable noise, we found that these failures can be corrected by considering previous failures. Specifically, we observe autocorrelated errors in these failures, which indicates that some predictable information remains. In this study, to capture the correlation of errors, we introduce ResCAL, a residual estimation module for traffic forecasting, as a widely applicable add-on module to existing traffic forecasting models. Our ResCAL calibrates the prediction of the existing models in real time by estimating future errors using previous errors and graph signals. Extensive experiments on METR-LA and PEMS-BAY demonstrate that our ResCAL can correctly capture the correlation of errors and correct the failures of various traffic forecasting models in event situations.
Mining Multi-Label Samples from Single Positive Labels
Jun 12, 2022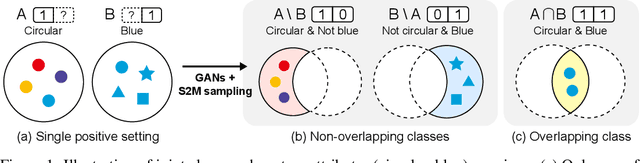
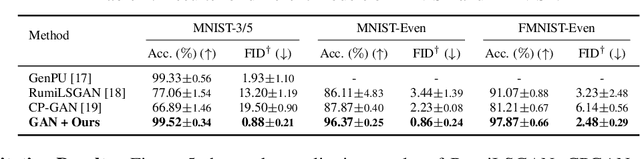

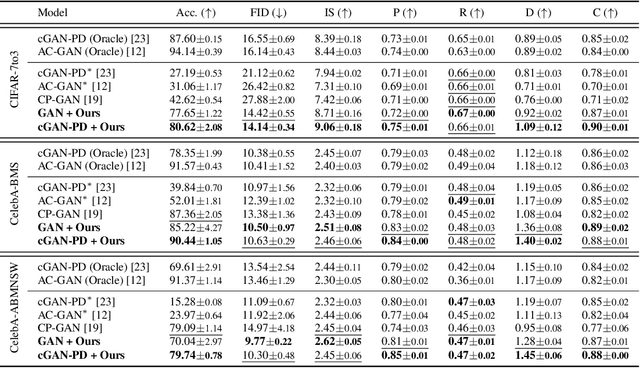
Conditional generative adversarial networks (cGANs) have shown superior results in class-conditional generation tasks. In order to simultaneously control multiple conditions, cGANs require multi-label training datasets, where multiple labels can be assigned to each data instance. Nevertheless, the tremendous annotation cost limits the accessibility of multi-label datasets in the real-world scenarios. Hence, we explore the practical setting called single positive setting, where each data instance is annotated by only one positive label with no explicit negative labels. To generate multi-label data in the single positive setting, we propose a novel sampling approach called single-to-multi-label (S2M) sampling, based on the Markov chain Monte Carlo method. As a widely applicable "add-on" method, our proposed S2M sampling enables existing unconditional and conditional GANs to draw high-quality multi-label data with a minimal annotation cost. Extensive experiments on real image datasets verify the effectiveness and correctness of our method, even when compared to a model trained with fully annotated datasets.