 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-Incremental Learning from Data Using Temporal Logics
Dec 28, 2021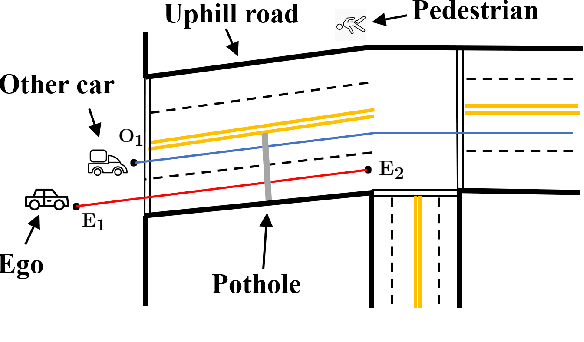
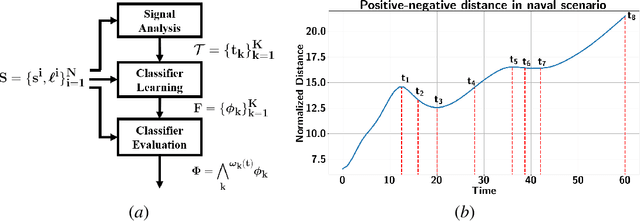
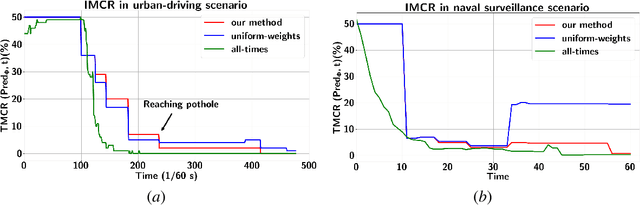
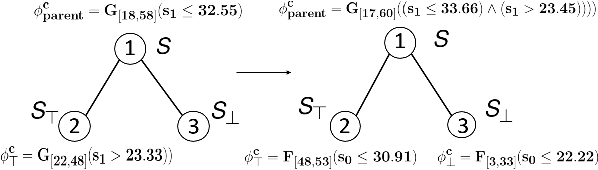
Real-time and human-interpretable decision-making in cyber-physical systems is a significant but challenging task, which usually requires predictions of possible future events from limited data. In this paper, we introduce a time-incremental learning framework: given a dataset of labeled signal traces with a common time horizon, we propose a method to predict the label of a signal that is received incrementally over time, referred to as prefix signal. Prefix signals are the signals that are being observed as they are generated, and their time length is shorter than the common horizon of signals. We present a novel decision-tree based approach to generate a finite number of Signal Temporal Logic (STL) specifications from the given dataset, and construct a predictor based on them. Each STL specification, as a binary classifier of time-series data, captures the temporal properties of the dataset over time. The predictor is constructed by assigning time-variant weights to the STL formulas. The weights are learned by using neural networks, with the goal of minimizing the misclassification rate for the prefix signals defined over the given dataset. The learned predictor is used to predict the label of a prefix signal, by computing the weighted sum of the robustness of the prefix signal with respect to each STL formula. The effectiveness and classification performance of our algorithm are evaluated on an urban-driving and a naval-surveillance case studies.
Classification of Time-Series Data Using Boosted Decision Trees
Oct 01, 2021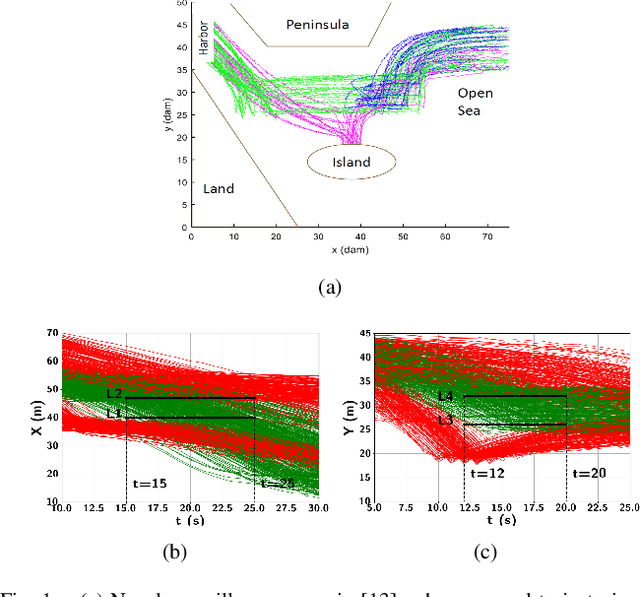
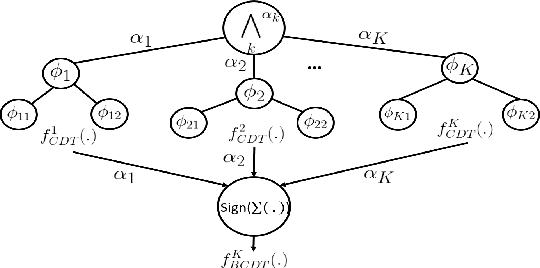
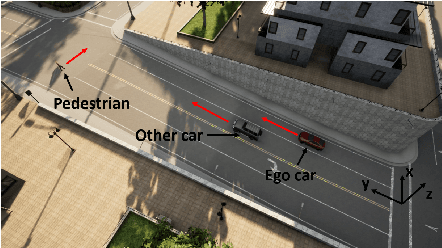
Time-series data classification is central to the analysis and control of autonomous systems, such as robots and self-driving cars. Temporal logic-based learning algorithms have been proposed recently as classifiers of such data. However, current frameworks are either inaccurate for real-world applications, such as autonomous driving, or they generate long and complicated formulae that lack interpretability. To address these limitations, we introduce a novel learning method, called Boosted Concise Decision Trees (BCDTs), to generate binary classifiers that are represented as Signal Temporal Logic (STL) formulae. Our algorithm leverages an ensemble of Concise Decision Trees (CDTs) to improve the classification performance, where each CDT is a decision tree that is empowered by a set of techniques to generate simpler formulae and improve interpretability. The effectiveness and classification performance of our algorithm are evaluated on naval surveillance and urban-driving case studies.
Inferring Temporal Logic Properties from Data using Boosted Decision Trees
May 24, 2021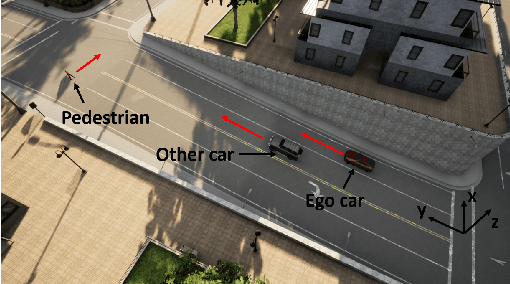
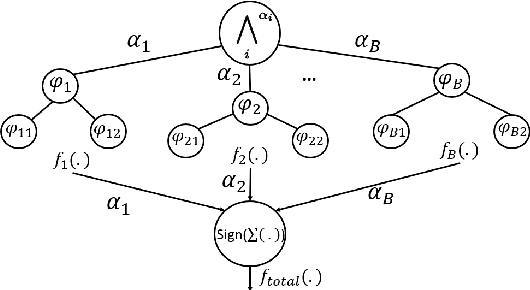
Many autonomous systems, such as robots and self-driving cars, involve real-time decision making in complex environments, and require prediction of future outcomes from limited data. Moreover, their decisions are increasingly required to be interpretable to humans for safe and trustworthy co-existence. This paper is a first step towards interpretable learning-based robot control. We introduce a novel learning problem, called incremental formula and predictor learning, to generate binary classifiers with temporal logic structure from time-series data. The classifiers are represented as pairs of Signal Temporal Logic (STL) formulae and predictors for their satisfaction. The incremental property provides prediction of labels for prefix signals that are revealed over time. We propose a boosted decision-tree algorithm that leverages weak, but computationally inexpensive, learners to increase prediction and runtime performance. The effectiveness and classification accuracy of our algorithms are evaluated on autonomous-driving and naval surveillance case studies.
A Control Architecture for Provably-Correct Autonomous Driving
May 06, 2021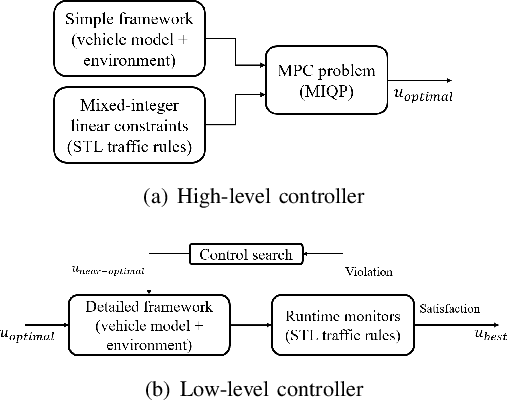
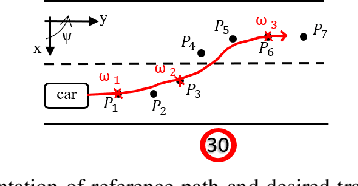
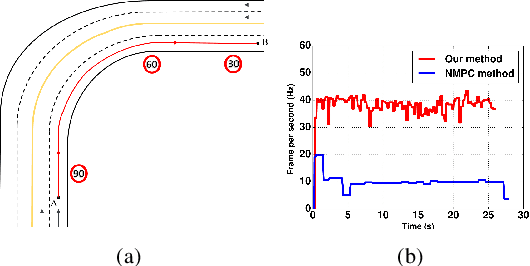
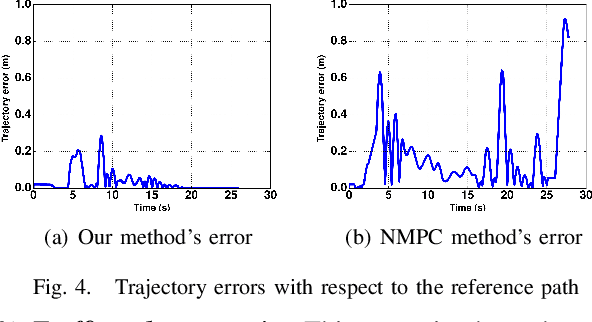
This paper presents a novel two-level control architecture for a fully autonomous vehicle in a deterministic environment, which can handle traffic rules as specifications and low-level vehicle control with real-time performance. At the top level, we use a simple representation of the environment and vehicle dynamics to formulate a linear Model Predictive Control (MPC) problem. We describe the traffic rules and safety constraints using Signal Temporal Logic (STL) formulas, which are mapped to mixed integer-linear constraints in the optimization problem. The solution obtained at the top level is used at the bottom-level to determine the best control command for satisfying the constraints in a more detailed framework. At the bottom-level, specification-based runtime monitoring techniques, together with detailed representations of the environment and vehicle dynamics, are used to compensate for the mismatch between the simple models used in the MPC and the real complex models. We obtain substantial improvements over existing approaches in the literature in the sense of runtime performance and we validate the effectiveness of our proposed control approach in the simulator CARLA.
Sampling-Based Temporal Logic Path Planning
Jul 27, 2013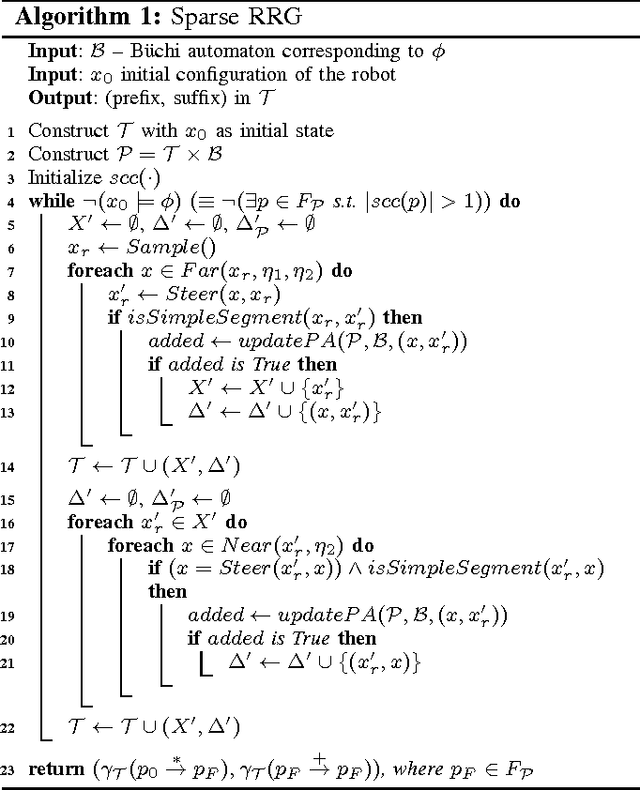
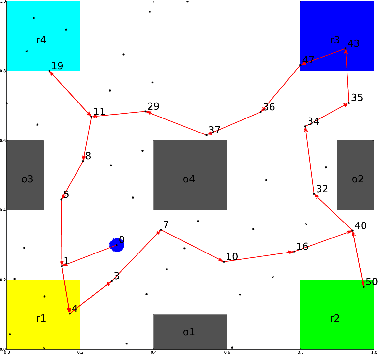
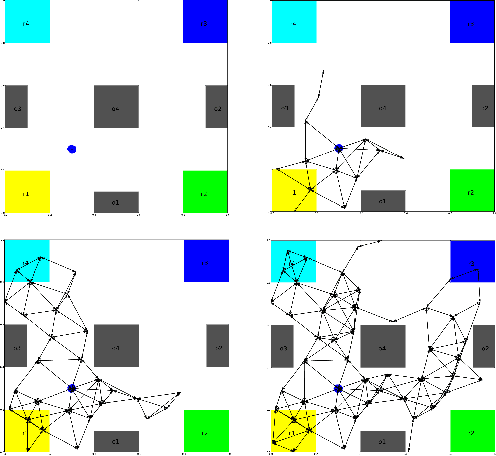
In this paper, we propose a sampling-based motion planning algorithm that finds an infinite path satisfying a Linear Temporal Logic (LTL) formula over a set of properties satisfied by some regions in a given environment. The algorithm has three main features. First, it is incremental, in the sense that the procedure for finding a satisfying path at each iteration scales only with the number of new samples generated at that iteration. Second, the underlying graph is sparse, which guarantees the low complexity of the overall method. Third, it is probabilistically complete. Examples illustrating the usefulness and the performance of the method are included.