 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEngineering Resource-constrained Software Systems with DNN Components: a Concept-based Pruning Approach
Apr 11, 2026Deep Neural Networks (DNNs) are widely used by engineers to solve difficult problems that require predictive modeling from data. However, these models are often massive, with millions or billions of parameters, and require substantial computational power, RAM, and storage. This becomes a limitation in practical scenarios where strict size and resource constraints must be respected. In this paper, we present a novel concept-based pruning technique for DNNs that guides pruning decisions using human-interpretable concepts, such as features, colors, and classes. This is particularly important in a software engineering context, as DNNs are integrated into systems and must be pruned according to specific system requirements. Our concept-based pruning solution analyzes neuron activations to identify important neurons from a system requirements viewpoint and uses this information to guide the DNN pruning. We assess our solution using the VGG-19 network and a dataset of 26'384 RGB images, focusing on its ability to produce small, effective pruned DNNs and on the computational complexity and performance of these pruned DNNs. We also analyzed the pruning efficiency of our solution and compared alternative configurations. Our results show that concept-based pruning efficiently generates much smaller, effective pruned DNNs. Pruning greatly improves the computational efficiency and performance of DNNs, properties that are particularly useful for practical applications with stringent memory and computational time constraints. Finally, alternative configuration options enable engineers to identify trade-offs adapted to different practical situations.
Ensembles-based Feature Guided Analysis
Mar 20, 2026Recent Deep Neural Networks (DNN) applications ask for techniques that can explain their behavior. Existing solutions, such as Feature Guided Analysis (FGA), extract rules on their internal behaviors, e.g., by providing explanations related to neurons activation. Results from the literature show that these rules have considerable precision (i.e., they correctly predict certain classes of features), but the recall (i.e., the number of situations these rule apply) is more limited. To mitigate this problem, this paper presents Ensembles-based Feature Guided Analysis (EFGA). EFGA combines rules extracted by FGA into ensembles. Ensembles aggregate different rules to increase their applicability depending on an aggregation criterion, a policy that dictates how to combine rules into ensembles. Although our solution is extensible, and different aggregation criteria can be developed by users, in this work, we considered three different aggregation criteria. We evaluated how the choice of the criterion influences the effectiveness of EFGA on two benchmarks (i.e., the MNIST and LSC datasets), and found that different aggregation criteria offer alternative trade-offs between precision and recall. We then compare EFGA with FGA. For this experiment, we selected an aggregation criterion that provides a reasonable trade-off between precision and recall. Our results show that EFGA has higher train recall (+28.51% on MNIST, +33.15% on LSC), and test recall (+25.76% on MNIST, +30.81% on LSC) than FGA, with a negligible reduction on the test precision (-0.89% on MNIST, -0.69% on LSC).
Proceedings of the First Workshop on Agents and Robots for reliable Engineered Autonomy
Jul 22, 2020This volume contains the proceedings of the First Workshop on Agents and Robots for reliable Engineered Autonomy (AREA 2020), co-located with the 24th European Conference on Artificial Intelligence (ECAI 2020). AREA brings together researchers from autonomous agents, software engineering and robotic communities, as combining knowledge coming from these research areas may lead to innovative approaches that solve complex problems related with the verification and validation of autonomous robotic systems.
Specification Patterns for Robotic Missions
Jan 07, 2019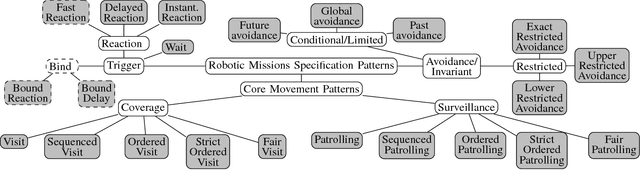
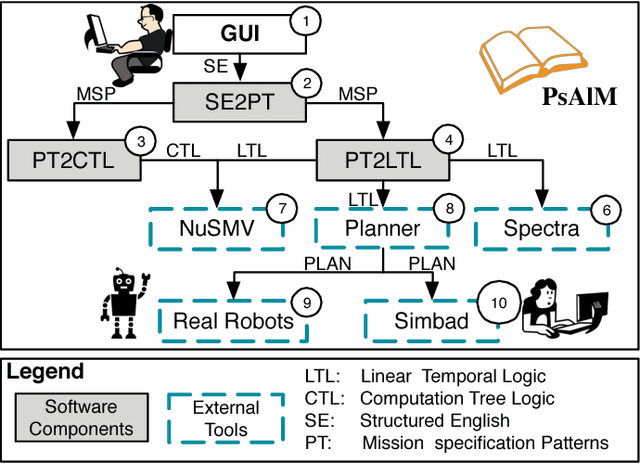
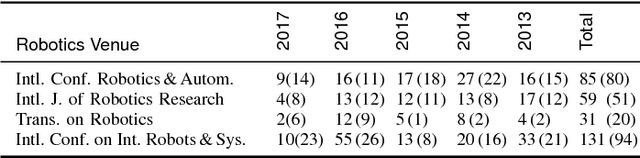
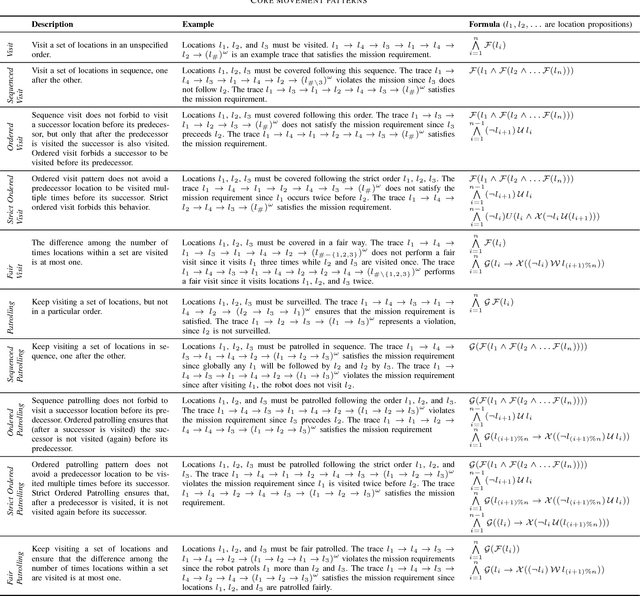
Mobile and general-purpose robots increasingly support our everyday life, requiring dependable robotics control software. Creating such software mainly amounts to implementing their complex behaviors known as missions. Recognizing the need, a large number of domain-specific specification languages has been proposed. These, in addition to traditional logical languages, allow the use of formally specified missions for synthesis, verification, simulation, or guiding the implementation. For instance, the logical language LTL is commonly used by experts to specify missions, as an input for planners, which synthesize the behavior a robot should have. Unfortunately, domain-specific languages are usually tied to specific robot models, while logical languages such as LTL are difficult to use by non-experts. We present a catalog of 22 mission specification patterns for mobile robots, together with tooling for instantiating, composing, and compiling the patterns to create mission specifications. The patterns provide solutions for recurrent specification problems, each of which detailing the usage intent, known uses, relationships to other patterns, and---most importantly---a template mission specification in temporal logic. Our tooling produces specifications expressed in the LTL and CTL temporal logics to be used by planners, simulators, or model checkers. The patterns originate from 245 realistic textual mission requirements extracted from the robotics literature, and they are evaluated upon a total of 441 real-world mission requirements and 1251 mission specifications. Five of these reflect scenarios we defined with two well-known industrial partners developing human-size robots. We validated our patterns' correctness with simulators and two real robots.