 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Defect Detection for Mass-Produced Electronic Components Based on YOLO Object Detection Models
Oct 02, 2025Since the defect detection of conventional industry components is time-consuming and labor-intensive, it leads to a significant burden on quality inspection personnel and makes it difficult to manage product quality. In this paper, we propose an automated defect detection system for the dual in-line package (DIP) that is widely used in industry, using digital camera optics and a deep learning (DL)-based model. The two most common defect categories of DIP are examined: (1) surface defects, and (2) pin-leg defects. However, the lack of defective component images leads to a challenge for detection tasks. To solve this problem, the ConSinGAN is used to generate a suitable-sized dataset for training and testing. Four varieties of the YOLO model are investigated (v3, v4, v7, and v9), both in isolation and with the ConSinGAN augmentation. The proposed YOLOv7 with ConSinGAN is superior to the other YOLO versions in accuracy of 95.50\%, detection time of 285 ms, and is far superior to threshold-based approaches. In addition, the supervisory control and data acquisition (SCADA) system is developed, and the associated sensor architecture is described. The proposed automated defect detection can be easily established with numerous types of defects or insufficient defect data.
* 12 pages, 16 figures, 7 tables, and published in IEEE Sensors Journal
Designing an Inertia Actuator with a Fast Rotating Gyro inside an Egg-shaped Robot
May 24, 2019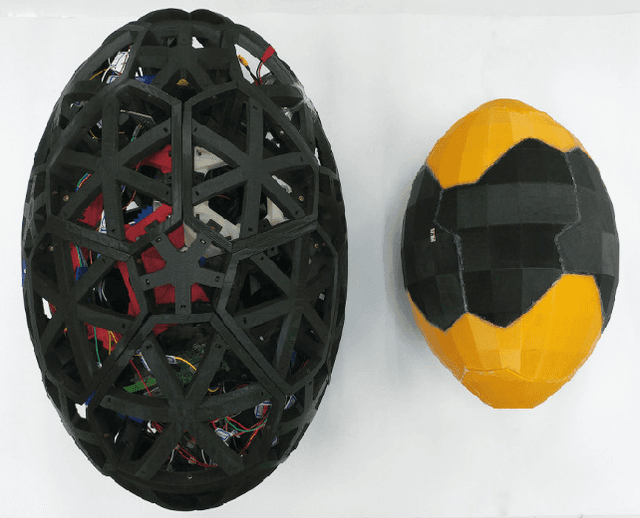
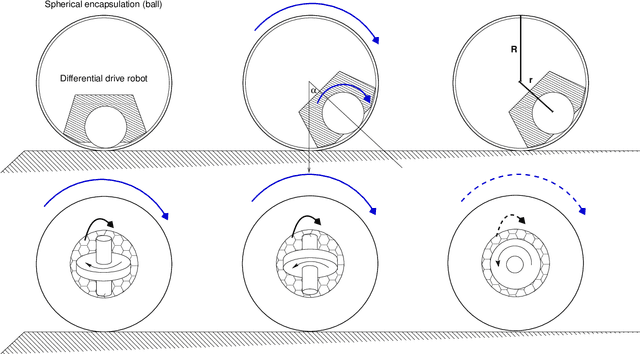
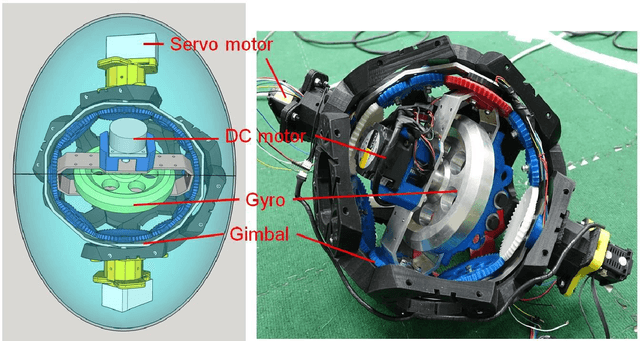
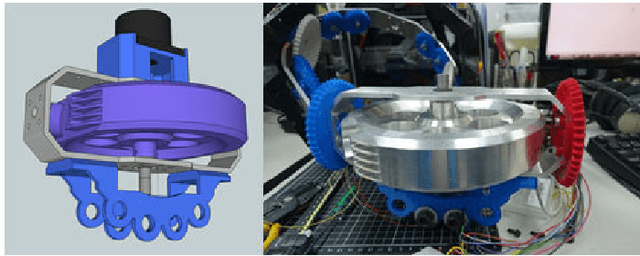
In this paper, we describe features of two new robot prototypes that are actuated by an actively controlled gyro (flywheel, symmetric rotor) inside a hollow sphere that is located in the middle of the robots. No external actuators are used. The outside structure of the robots and the gyro are connected by a gimbal, which is similar in structure to a control moment gyroscope in spacecrafts. The joints of the gimbal can be actuated. In this way, the orientation of axis for the gyro in relation to the egg can be changed. Since the inertia of the fast rotating gyro is large in relation to the outside structure, a relative rotation of the axis against the outside structure results in a motion of the egg by inertia principle. In this way, we can use this principle for controlling the robot to move forward and turn around. The robots are shaped as spheroidal ellipsoids so they resemble eggs. So far, we have built and tested two robot prototypes.