 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-based Multi-agent Race Strategies in Formula 1
Feb 26, 2026In Formula 1, race strategies are adapted according to evolving race conditions and competitors' actions. This paper proposes a reinforcement learning approach for multi-agent race strategy optimization. Agents learn to balance energy management, tire degradation, aerodynamic interaction, and pit-stop decisions. Building on a pre-trained single-agent policy, we introduce an interaction module that accounts for the behavior of competitors. The combination of the interaction module and a self-play training scheme generates competitive policies, and agents are ranked based on their relative performance. Results show that the agents adapt pit timing, tire selection, and energy allocation in response to opponents, achieving robust and consistent race performance. Because the framework relies only on information available during real races, it can support race strategists' decisions before and during races.
On the Interaction between Autonomous Mobility-on-Demand and Public Transportation Systems
Sep 05, 2018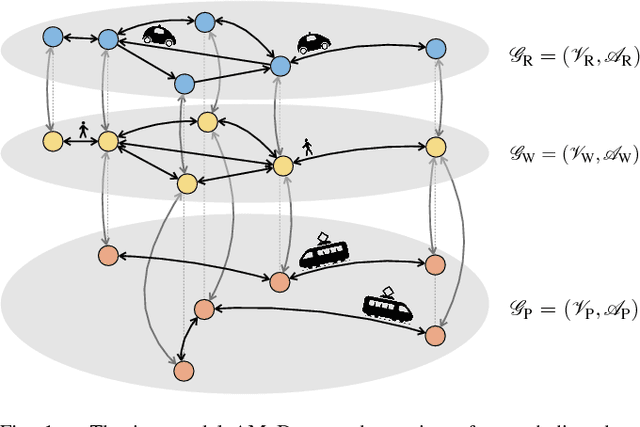
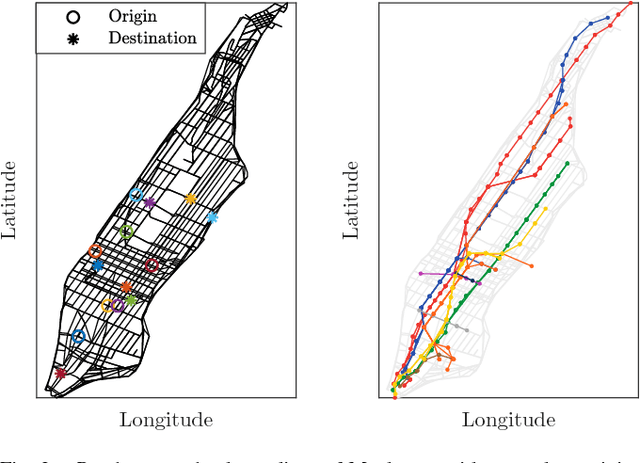
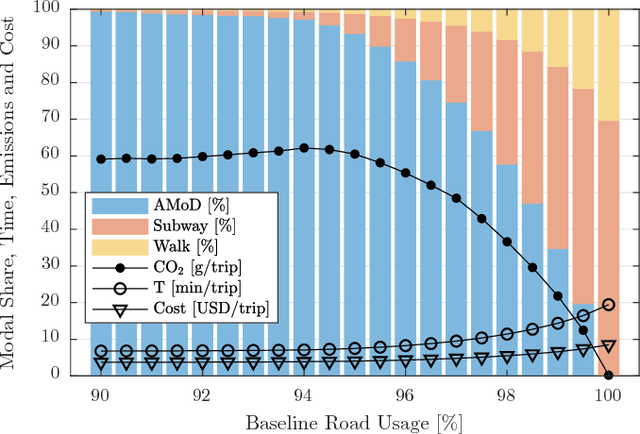
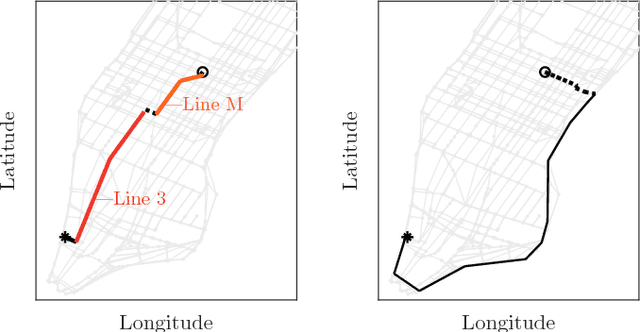
In this paper we study models and coordination policies for intermodal Autonomous Mobility-on-Demand (AMoD), wherein a fleet of self-driving vehicles provides on-demand mobility jointly with public transit. Specifically, we first present a network flow model for intermodal AMoD, where we capture the coupling between AMoD and public transit and the goal is to maximize social welfare. Second, leveraging such a model, we design a pricing and tolling scheme that allows to achieve the social optimum under the assumption of a perfect market with selfish agents. Finally, we present a real-world case study for New York City. Our results show that the coordination between AMoD fleets and public transit can yield significant benefits compared to an AMoD system operating in isolation.