 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuadratic integrate-and-fire neurons exhibit less fragmented loss landscapes and outperform leaky integrate-and-fire neurons in spike-based gradient descent
Jun 02, 2026The ability to train spiking neural networks is essential for modeling biological neural networks as well as for neuromorphic computing. However, for the extensively used leaky integrate-and-fire (LIF) neurons, arbitrarily small parameter changes can induce spike (dis)appearances that disrupt subsequent activity, leading to unstable neural representations and permanently silent neurons during exact spike-based gradient descent. Recent work shows that a class of neuron models, which includes the quadratic integrate-and-fire (QIF) neuron, avoids these discontinuities and enables continuous and even smooth spike-based gradient descent. However, it remains unclear whether these advantages translate into practice. Here, we demonstrate that they do so via a controlled comparison between networks of LIF and QIF neurons on the popular Spiking Heidelberg Digits dataset. Specifically, in a first step, we perform a thorough hyperparameter search to optimize both models, revealing a clear performance advantage of QIF neurons. In a second step, we visualize the loss and gradient landscapes. Consistent with their inferior performance, we find that the loss landscapes of LIF neurons, which are discontinuous, appear more fragmented and the related gradients more erratic. An analysis of the landscapes of single samples indicates that these features arise from changes in the temporal order of spikes, which often cause disruptive spike (dis)appearances. Overall, our results advocate replacing LIF neurons with neuron models exhibiting continuous spiking dynamics, such as QIF neurons, for gradient descent training.
Smooth Exact Gradient Descent Learning in Spiking Neural Networks
Sep 25, 2023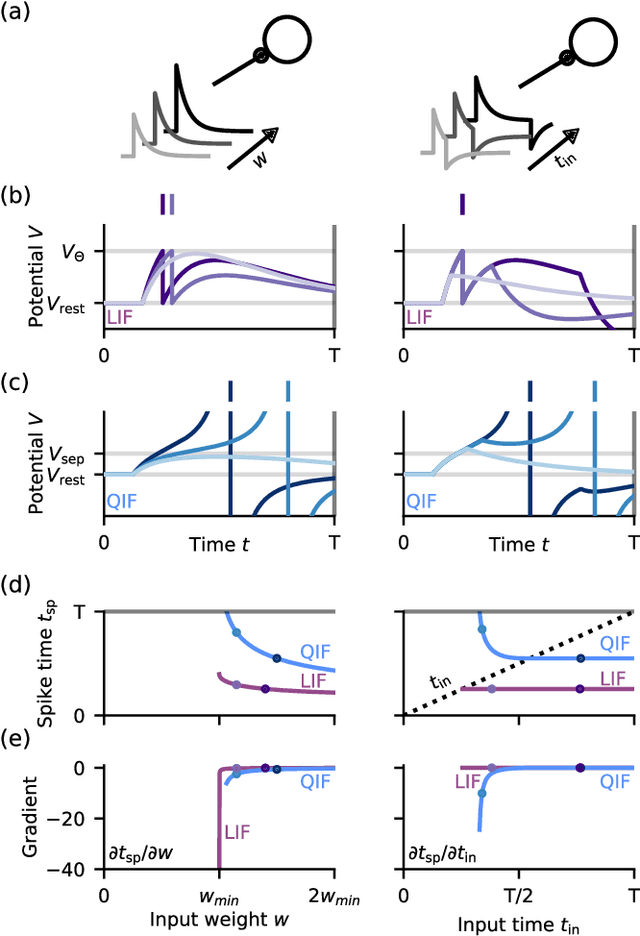
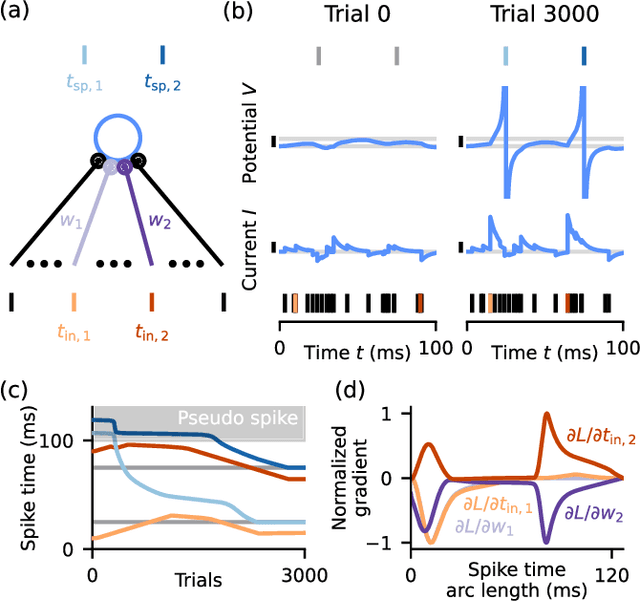
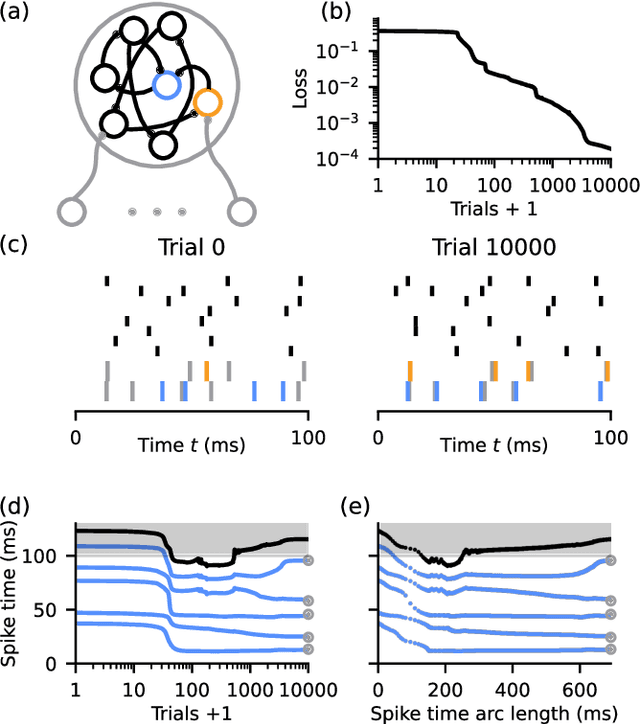
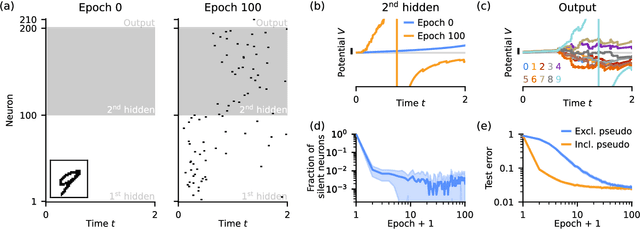
Artificial neural networks are highly successfully trained with backpropagation. For spiking neural networks, however, a similar gradient descent scheme seems prohibitive due to the sudden, disruptive (dis-)appearance of spikes. Here, we demonstrate exact gradient descent learning based on spiking dynamics that change only continuously. These are generated by neuron models whose spikes vanish and appear at the end of a trial, where they do not influence other neurons anymore. This also enables gradient-based spike addition and removal. We apply our learning scheme to induce and continuously move spikes to desired times, in single neurons and recurrent networks. Further, it achieves competitive performance in a benchmark task using deep, initially silent networks. Our results show how non-disruptive learning is possible despite discrete spikes.