 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Specialization: Robust Reinforcement Learning Navigation via Procedural Map Generators
May 04, 2026Deep reinforcement learning (DRL) navigation policies often overfit to the structure of their training environments, as environmental diversity is typically constrained by the manual effort required to design diverse scenarios. While procedural map generation offers scalable diversity, no prior work systematically compares how different generator types affect policy generalization. We integrate four generators (sparse, maze, graph, and Wave Function Collapse) with guaranteed navigability into MuRoSim, a 2D simulator focusing on training efficiency for LiDAR-based navigation. We cross-evaluate five navigation policies on 1000 seeded maps per generator across three training seeds. Results show a strongly asymmetric cross-generator transfer: a specialist trained on sparse layouts falls to 3.3% success on mazes, whereas a policy trained on the combined generator set achieves 91.5 +/- 1.1% mean success. We further demonstrate that A* path-planner subgoal inputs are the dominant factor for robustness, raising success from the 90.2 +/- 1.4% feedforward baseline to 98.9 +/- 0.4% and outperforming GRU recurrence, which only improves the reactive baseline. The DRL policies outperform a classical Carrot+A* controller, which matches their success only at low speeds (1.0 m/s) but collapses to 24.9% at 2.0 m/s. This highlights learned speed adaptation as the decisive advantage of the learned approach. Real-world experiments on a RoboMaster confirm sim-to-real transfer in a cluttered arena, while a maze-like layout exposes remaining failure modes that recurrence helps mitigate.
Learning Vision-Based Omnidirectional Navigation: A Teacher-Student Approach Using Monocular Depth Estimation
Mar 02, 2026Reliable obstacle avoidance in industrial settings demands 3D scene understanding, but widely used 2D LiDAR sensors perceive only a single horizontal slice of the environment, missing critical obstacles above or below the scan plane. We present a teacher-student framework for vision-based mobile robot navigation that eliminates the need for LiDAR sensors. A teacher policy trained via Proximal Policy Optimization (PPO) in NVIDIA Isaac Lab leverages privileged 2D LiDAR observations that account for the full robot footprint to learn robust navigation. The learned behavior is distilled into a student policy that relies solely on monocular depth maps predicted by a fine-tuned Depth Anything V2 model from four RGB cameras. The complete inference pipeline, comprising monocular depth estimation (MDE), policy execution, and motor control, runs entirely onboard an NVIDIA Jetson Orin AGX mounted on a DJI RoboMaster platform, requiring no external computation for inference. In simulation, the student achieves success rates of 82-96.5%, consistently outperforming the standard 2D LiDAR teacher (50-89%). In real-world experiments, the MDE-based student outperforms the 2D LiDAR teacher when navigating around obstacles with complex 3D geometries, such as overhanging structures and low-profile objects, that fall outside the single scan plane of a 2D LiDAR.
Obtaining Robust Control and Navigation Policies for Multi-Robot Navigation via Deep Reinforcement Learning
Sep 07, 2022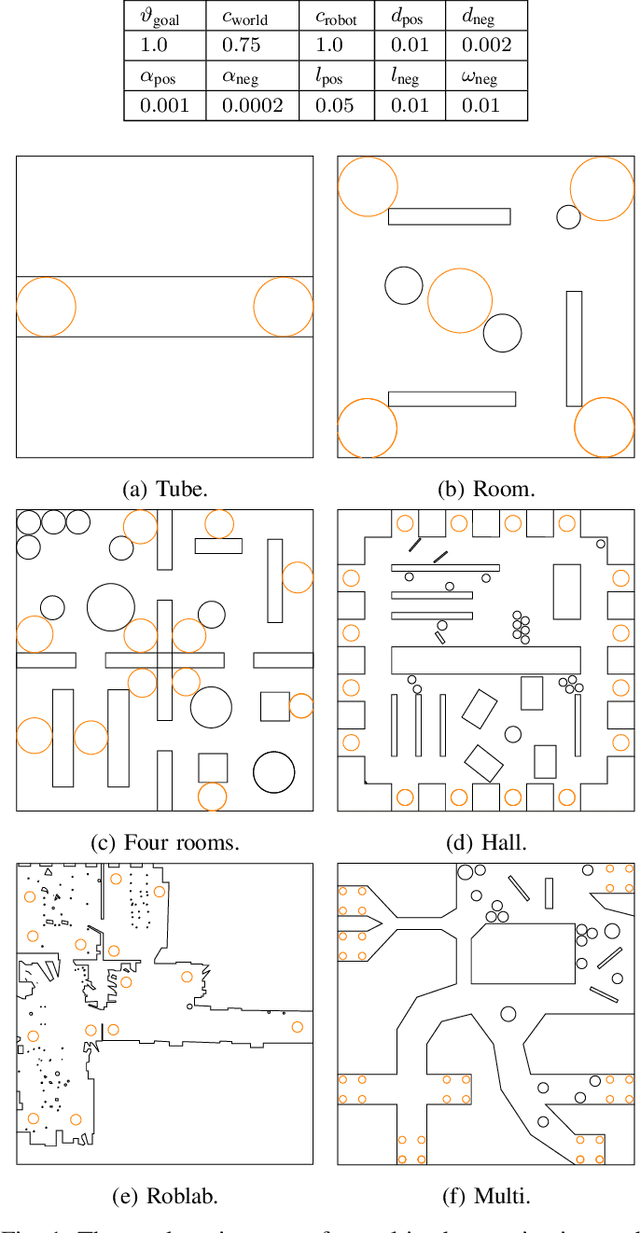
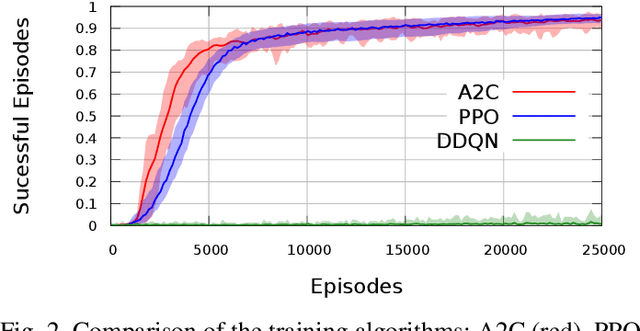
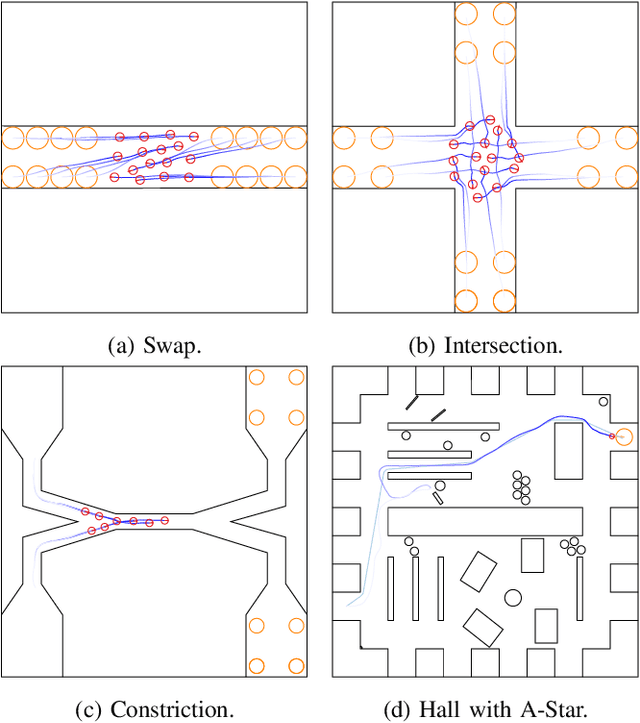
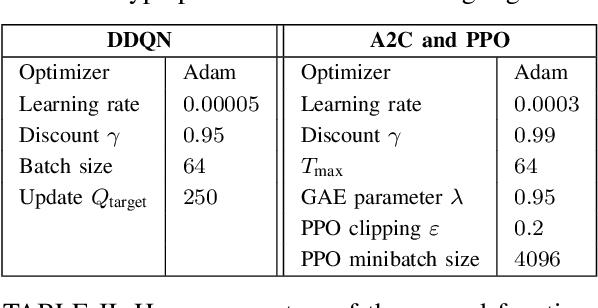
Multi-robot navigation is a challenging task in which multiple robots must be coordinated simultaneously within dynamic environments. We apply deep reinforcement learning (DRL) to learn a decentralized end-to-end policy which maps raw sensor data to the command velocities of the agent. In order to enable the policy to generalize, the training is performed in different environments and scenarios. The learned policy is tested and evaluated in common multi-robot scenarios like switching a place, an intersection and a bottleneck situation. This policy allows the agent to recover from dead ends and to navigate through complex environments.
Deep Reinforcement learning for real autonomous mobile robot navigation in indoor environments
May 28, 2020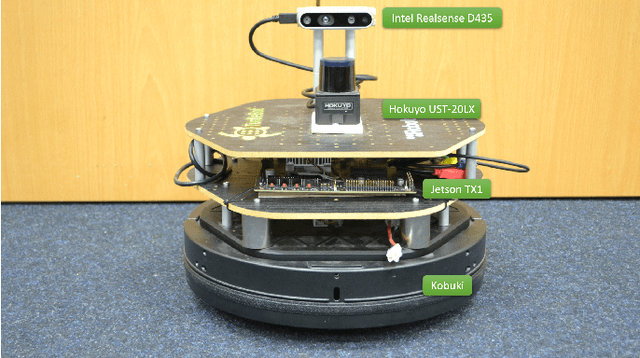
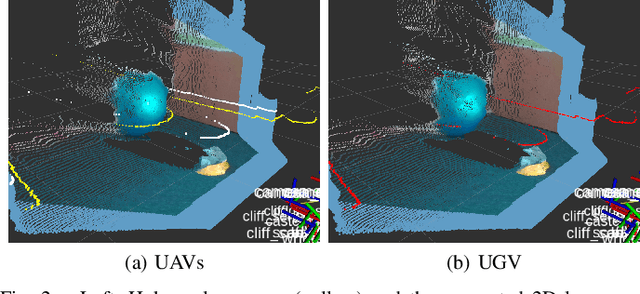
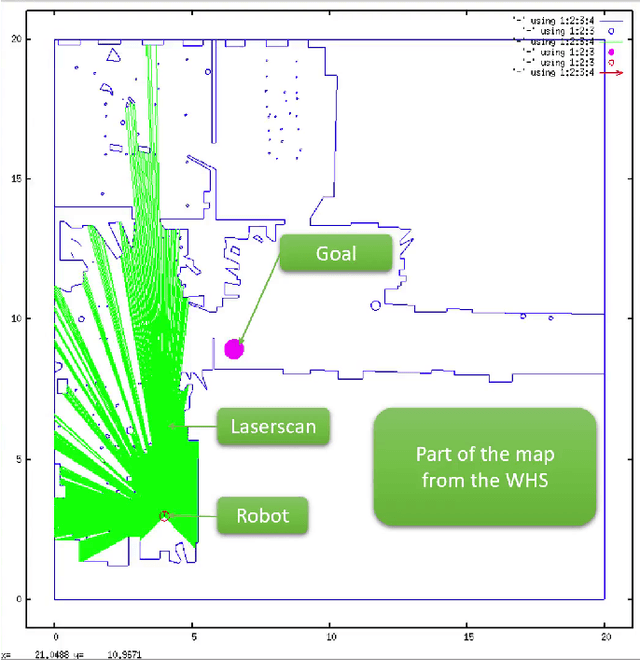
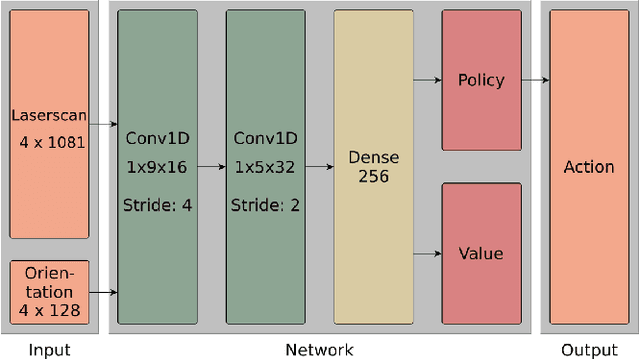
Deep Reinforcement Learning has been successfully applied in various computer games [8]. However, it is still rarely used in real-world applications, especially for the navigation and continuous control of real mobile robots [13]. Previous approaches lack safety and robustness and/or need a structured environment. In this paper we present our proof of concept for autonomous self-learning robot navigation in an unknown environment for a real robot without a map or planner. The input for the robot is only the fused data from a 2D laser scanner and a RGB-D camera as well as the orientation to the goal. The map of the environment is unknown. The output actions of an Asynchronous Advantage Actor-Critic network (GA3C) are the linear and angular velocities for the robot. The navigator/controller network is pretrained in a high-speed, parallel, and self-implemented simulation environment to speed up the learning process and then deployed to the real robot. To avoid overfitting, we train relatively small networks, and we add random Gaussian noise to the input laser data. The sensor data fusion with the RGB-D camera allows the robot to navigate in real environments with real 3D obstacle avoidance and without the need to fit the environment to the sensory capabilities of the robot. To further increase the robustness, we train on environments of varying difficulties and run 32 training instances simultaneously. Video: supplementary File / YouTube, Code: GitHub