 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Rigid Body Assembly via Contact-Implicit Optimal Control with Exact Second-Order Derivatives
Jan 30, 2026Efficient planning of assembly motions is a long standing challenge in the field of robotics that has been primarily tackled with reinforcement learning and sampling-based methods by using extensive physics simulations. This paper proposes a sample-efficient robust optimal control approach for the determination of assembly motions, which requires significantly less physics simulation steps during planning through the efficient use of derivative information. To this end, a differentiable physics simulation is constructed that provides second-order analytic derivatives to the numerical solver and allows one to traverse seamlessly from informative derivatives to accurate contact simulation. The solution of the physics simulation problem is made differentiable by using smoothing inspired by interior-point methods applied to both the collision detection as well as the contact resolution problem. We propose a modified variant of an optimization-based formulation of collision detection formulated as a linear program and present an efficient implementation for the nominal evaluation and corresponding first- and second-order derivatives. Moreover, a multi-scenario-based trajectory optimization problem that ensures robustness with respect to sim-to-real mismatches is derived. The capability of the considered formulation is illustrated by results where over 99\% successful executions are achieved in real-world experiments. Thereby, we carefully investigate the effect of smooth approximations of the contact dynamics and robust modeling on the success rates. Furthermore, the method's capability is tested on different peg-in-hole problems in simulation to show the benefit of using exact Hessians over commonly used Hessian approximations.
Automated Image Processing for the Analysis of DNA Repair Dynamics
Jan 18, 2011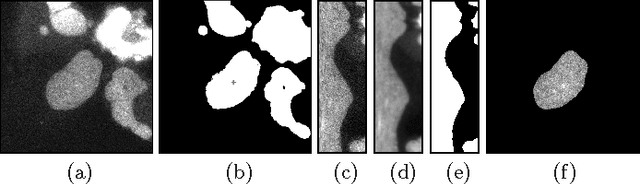

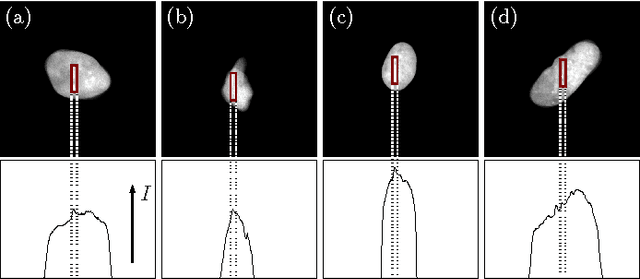
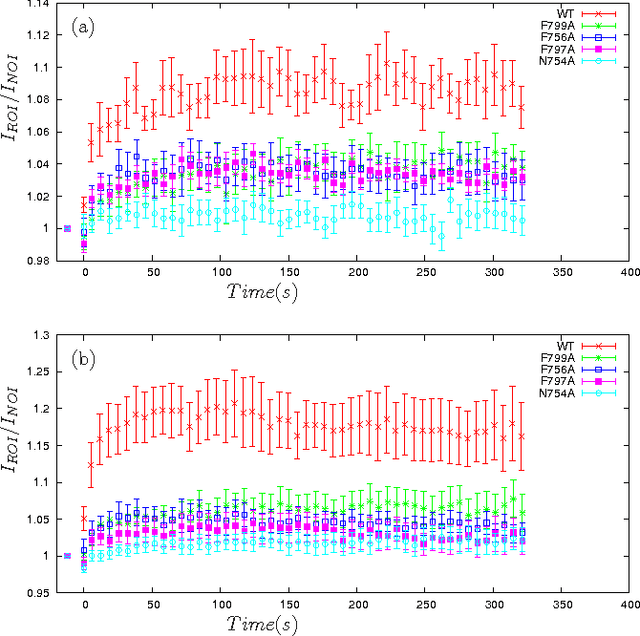
The efficient repair of cellular DNA is essential for the maintenance and inheritance of genomic information. In order to cope with the high frequency of spontaneous and induced DNA damage, a multitude of repair mechanisms have evolved. These are enabled by a wide range of protein factors specifically recognizing different types of lesions and finally restoring the normal DNA sequence. This work focuses on the repair factor XPC (xeroderma pigmentosum complementation group C), which identifies bulky DNA lesions and initiates their removal via the nucleotide excision repair pathway. The binding of XPC to damaged DNA can be visualized in living cells by following the accumulation of a fluorescent XPC fusion at lesions induced by laser microirradiation in a fluorescence microscope. In this work, an automated image processing pipeline is presented which allows to identify and quantify the accumulation reaction without any user interaction. The image processing pipeline comprises a preprocessing stage where the image stack data is filtered and the nucleus of interest is segmented. Afterwards, the images are registered to each other in order to account for movements of the cell, and then a bounding box enclosing the XPC-specific signal is automatically determined. Finally, the time-dependent relocation of XPC is evaluated by analyzing the intensity change within this box. Comparison of the automated processing results with the manual evaluation yields qualitatively similar results. However, the automated analysis provides more accurate, reproducible data with smaller standard errors. The image processing pipeline presented in this work allows for an efficient analysis of large amounts of experimental data with no user interaction required.