 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-Agent LLM Framework for Design Space Exploration in Autonomous Driving Systems
Dec 09, 2025



Designing autonomous driving systems requires efficient exploration of large hardware/software configuration spaces under diverse environmental conditions, e.g., with varying traffic, weather, and road layouts. Traditional design space exploration (DSE) approaches struggle with multi-modal execution outputs and complex performance trade-offs, and often require human involvement to assess correctness based on execution outputs. This paper presents a multi-agent, large language model (LLM)-based DSE framework, which integrates multi-modal reasoning with 3D simulation and profiling tools to automate the interpretation of execution outputs and guide the exploration of system designs. Specialized LLM agents are leveraged to handle user input interpretation, design point generation, execution orchestration, and analysis of both visual and textual execution outputs, which enables identification of potential bottlenecks without human intervention. A prototype implementation is developed and evaluated on a robotaxi case study (an SAE Level 4 autonomous driving application). Compared with a genetic algorithm baseline, the proposed framework identifies more Pareto-optimal, cost-efficient solutions with reduced navigation time under the same exploration budget. Experimental results also demonstrate the efficiency of the adoption of the LLM-based approach for DSE. We believe that this framework paves the way to the design automation of autonomous driving systems.
ResPerfNet: Deep Residual Learning for Regressional Performance Modeling of Deep Neural Networks
Dec 03, 2020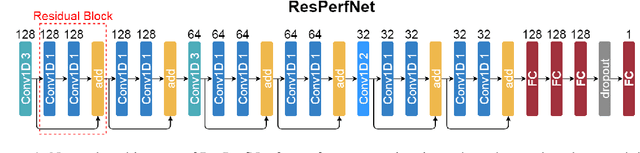

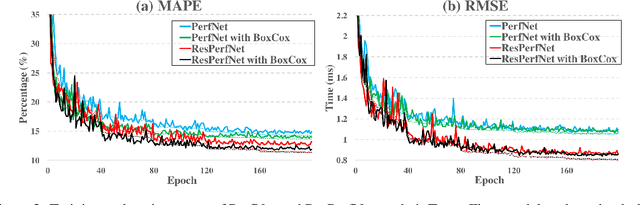
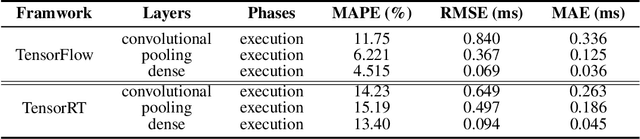
The rapid advancements of computing technology facilitate the development of diverse deep learning applications. Unfortunately, the efficiency of parallel computing infrastructures varies widely with neural network models, which hinders the exploration of the design space to find high-performance neural network architectures on specific computing platforms for a given application. To address such a challenge, we propose a deep learning-based method, ResPerfNet, which trains a residual neural network with representative datasets obtained on the target platform to predict the performance for a deep neural network. Our experimental results show that ResPerfNet can accurately predict the execution time of individual neural network layers and full network models on a variety of platforms. In particular, ResPerfNet achieves 8.4% of mean absolute percentage error for LeNet, AlexNet and VGG16 on the NVIDIA GTX 1080Ti, which is substantially lower than the previously published works.