 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPT-4o System Card
Oct 25, 2024GPT-4o is an autoregressive omni model that accepts as input any combination of text, audio, image, and video, and generates any combination of text, audio, and image outputs. It's trained end-to-end across text, vision, and audio, meaning all inputs and outputs are processed by the same neural network. GPT-4o can respond to audio inputs in as little as 232 milliseconds, with an average of 320 milliseconds, which is similar to human response time in conversation. It matches GPT-4 Turbo performance on text in English and code, with significant improvement on text in non-English languages, while also being much faster and 50\% cheaper in the API. GPT-4o is especially better at vision and audio understanding compared to existing models. In line with our commitment to building AI safely and consistent with our voluntary commitments to the White House, we are sharing the GPT-4o System Card, which includes our Preparedness Framework evaluations. In this System Card, we provide a detailed look at GPT-4o's capabilities, limitations, and safety evaluations across multiple categories, focusing on speech-to-speech while also evaluating text and image capabilities, and measures we've implemented to ensure the model is safe and aligned. We also include third-party assessments on dangerous capabilities, as well as discussion of potential societal impacts of GPT-4o's text and vision capabilities.
Safety Aware Reinforcement Learning (SARL)
Oct 06, 2020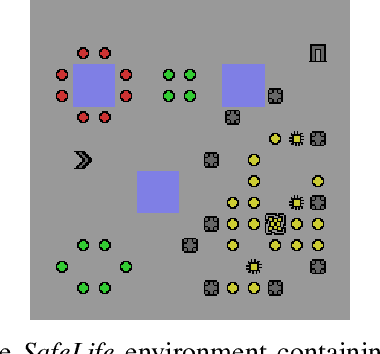
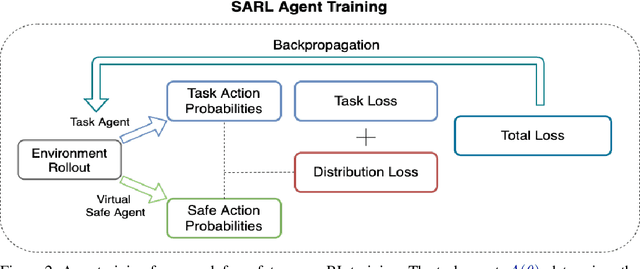

As reinforcement learning agents become increasingly integrated into complex, real-world environments, designing for safety becomes a critical consideration. We specifically focus on researching scenarios where agents can cause undesired side effects while executing a policy on a primary task. Since one can define multiple tasks for a given environment dynamics, there are two important challenges. First, we need to abstract the concept of safety that applies broadly to that environment independent of the specific task being executed. Second, we need a mechanism for the abstracted notion of safety to modulate the actions of agents executing different policies to minimize their side-effects. In this work, we propose Safety Aware Reinforcement Learning (SARL) - a framework where a virtual safe agent modulates the actions of a main reward-based agent to minimize side effects. The safe agent learns a task-independent notion of safety for a given environment. The main agent is then trained with a regularization loss given by the distance between the native action probabilities of the two agents. Since the safe agent effectively abstracts a task-independent notion of safety via its action probabilities, it can be ported to modulate multiple policies solving different tasks within the given environment without further training. We contrast this with solutions that rely on task-specific regularization metrics and test our framework on the SafeLife Suite, based on Conway's Game of Life, comprising a number of complex tasks in dynamic environments. We show that our solution is able to match the performance of solutions that rely on task-specific side-effect penalties on both the primary and safety objectives while additionally providing the benefit of generalizability and portability.