 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalytic Model for Quadruped Locomotion Task-Space Planning
Apr 11, 2019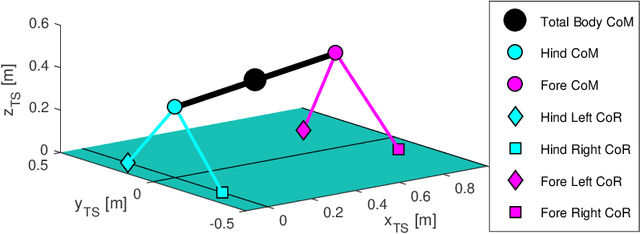
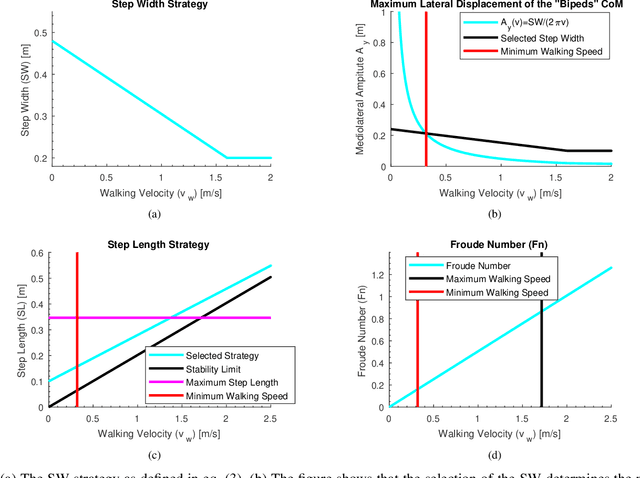
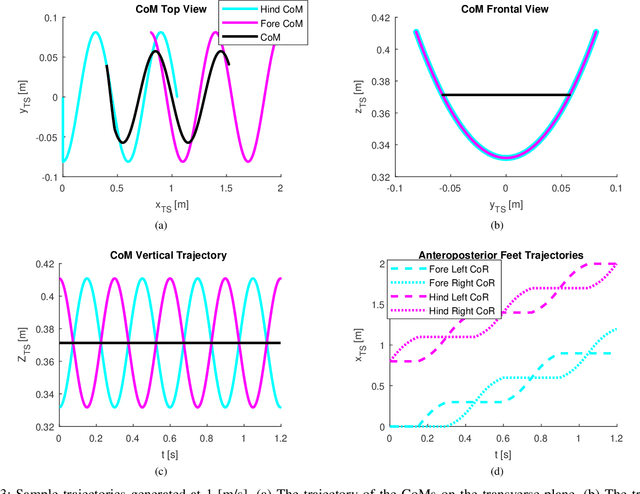
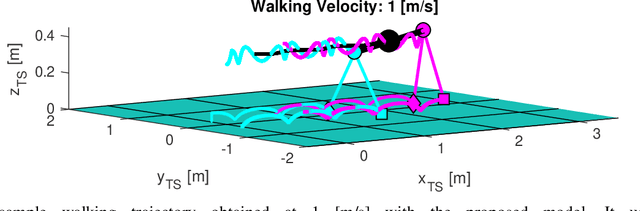
Despite the extensive presence of the legged locomotion in animals, it is extremely challenging to be reproduced with robots. Legged locomotion is an dynamic task which benefits from a planning that takes advantage of the gravitational pull on the system. However, the computational cost of such optimization rapidly increases with the complexity of kinematic structures, rendering impossible real-time deployment in unstructured environments. This paper proposes a simplified method that can generate desired centre of mass and feet trajectory for quadrupeds. The model describes a quadruped as two bipeds connected via their centres of mass, and it is based on the extension of an algebraic bipedal model that uses the topology of the gravitational attractor to describe bipedal locomotion strategies. The results show that the model generates trajectories that agrees with previous studies. The model will be deployed in the future as seed solution for whole-body trajectory optimization in the attempt to reduce the computational cost and obtain real-time planning of complex action in challenging environments.
Bioinspired Straight Walking Task-Space Planner
Oct 18, 2018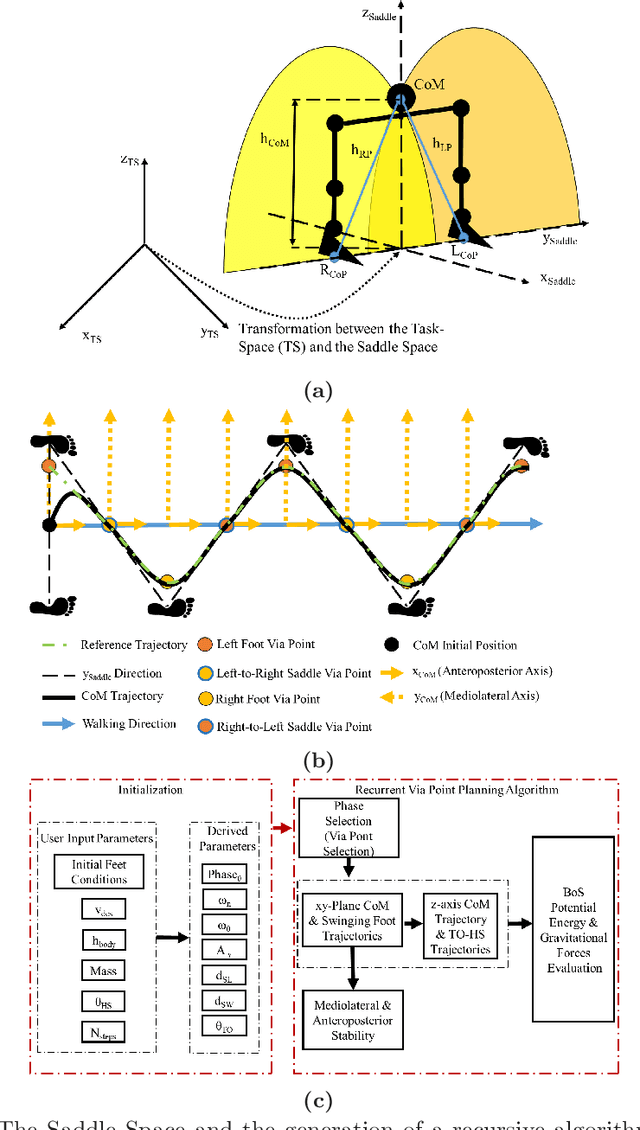
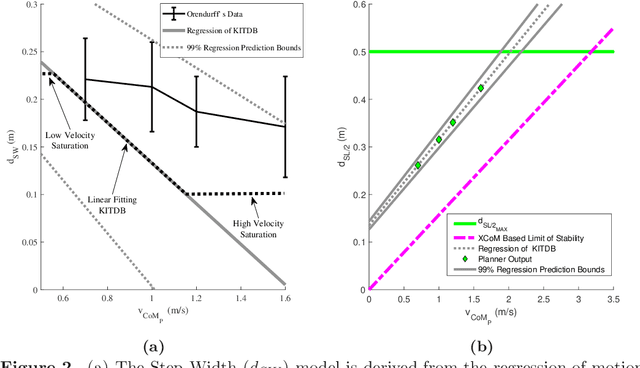
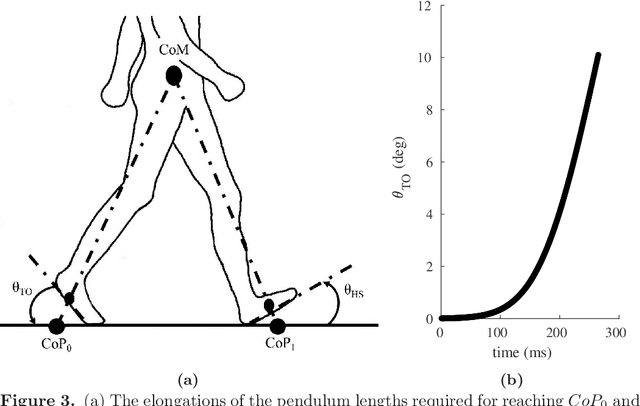
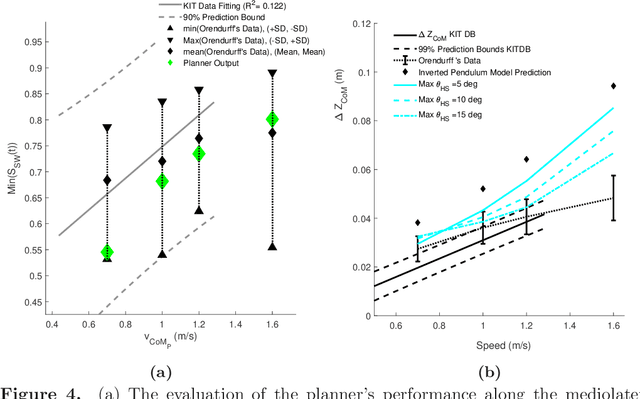
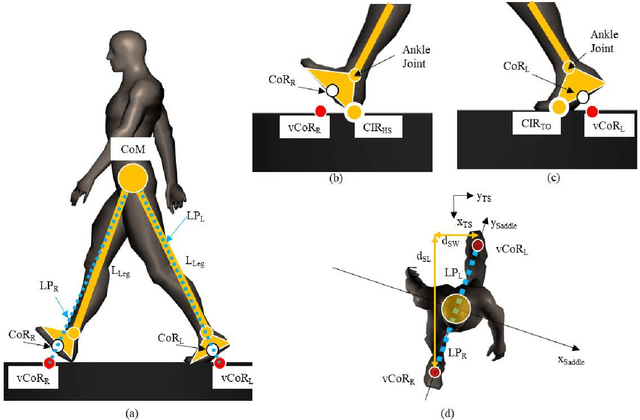
Despite the improvements in humanoids robots over the last decades, they are still far behind compared to human locomotor abilities. Their performance limitations can be partially attributed to the hardware, but the primary constraint has been the understanding of bipedal dynamics. Based on the recently developed model of potential energy for bipedal structures, this work proposes a task-space planner for human-like straight locomotion. The proposed architecture is based on potential energy model and employs locomotor strategies from human data as a reference behaviour. The model generates Centre of Mass (CoM) trajectories, foot swing trajectories and the Base of Support (BoS). Their calculation relies on the knowledge of the desired speed, initial posture, height, weight, number of steps and the angle between the foot and the ground during heel-strike. The data show that the proposed architecture can generate behaviour in line with human walking strategies for both the CoM and the foot swing. Although the planned trajectory is not smooth compared to human trajectories, the proposed model significantly reduces the error in the estimation of the CoM vertical trajectory. Moreover, the proposed planner can generate a single stride in less than 140 ms and sequences of 10 strides in less than 600 ms, it allows an online task-space planning for locomotion. Lastly, the proposed architecture is also supported by analogies with current theories on human motor control of locomotion.
Deployment of the Saddle Space Transformation in Tracking the Base of Support
Sep 03, 2018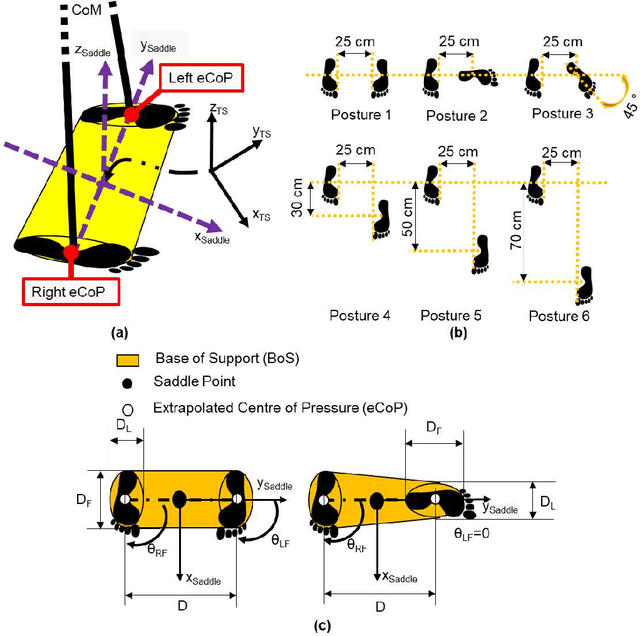
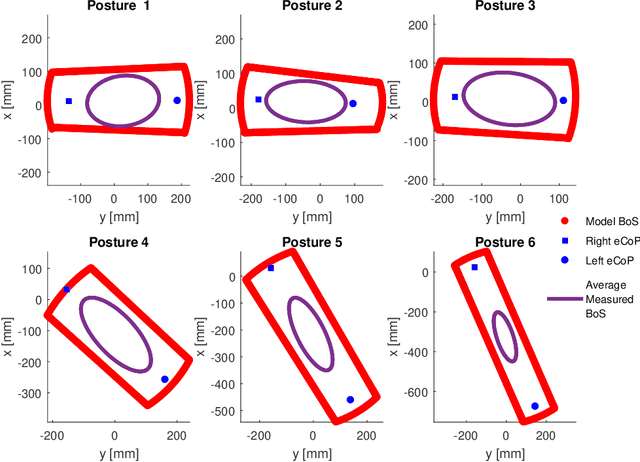
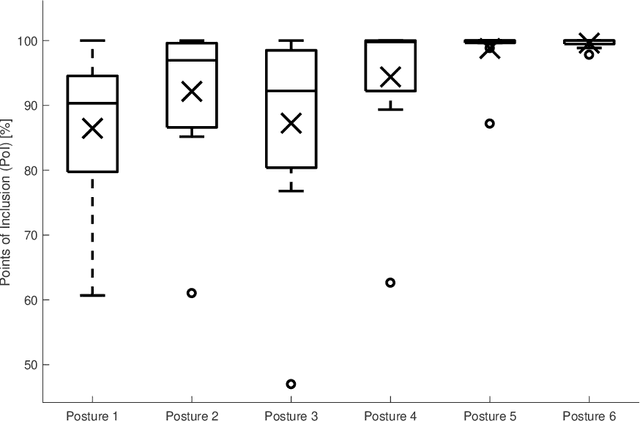
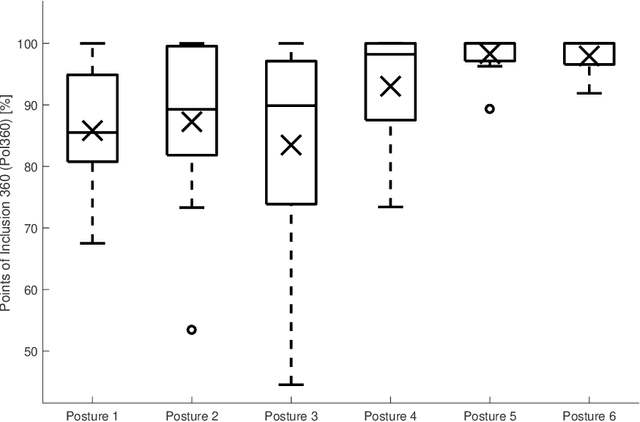
Balance is the fundamental skill behind human locomotion, and its impairment is the principal indicator of self-perceived disability. Despite significant improvements in balance assessment, there is still large incidence of fall related injuries among elderlies. The Base of Support (BoS) is a popular method for bipedal stability assessment, but its accuracy depends on the accuracy the BoS geometry measurement. This work presents a method to ease the BoS tracking by the identification of a reference frame that allows to define postural models of the BoS geometry. Although we also propose a geometry based on the geometry determined from centre of pressure range of motion within the foot obtained from literature, this methodology can be used with other models (i.e., the feasible base of support). The model has been tested with 12 healthy subjects, which have been asked to explore their stability in six different postures. The results show that the model can accurate deform the geometry of the BoS to adapt its shape to the different postures, which can remove the necessity of force/torque sensors in some application. Potentially the proposed method can be also applied to describe any posture dependent attribute (e.g., gravitational forces), and it can be also applied to bipedal robots. Therefore, it constitutes a novel mathematical tool that can be deployed to develop both better sensors and models for bipeds. For example, it can be used with the Extrapolated CoM model to evaluate dynamic stability from the body kinematics.
The Strange Attractor of Bipedal Locomotion and Consequences on Motor Control
Sep 03, 2018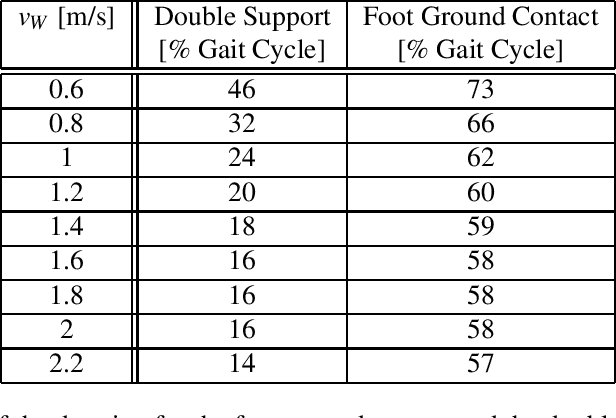
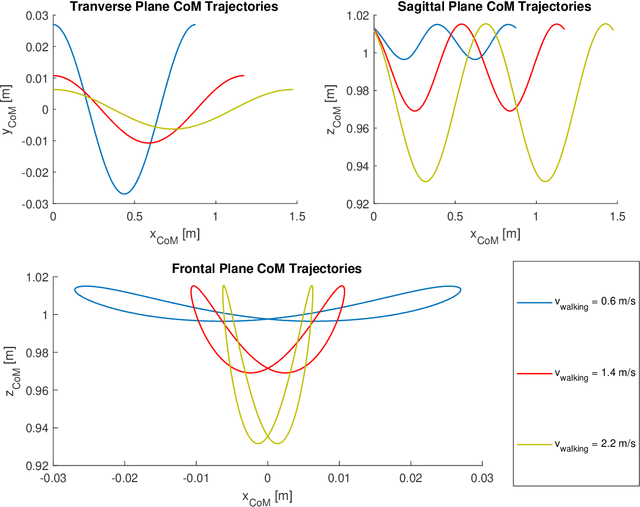
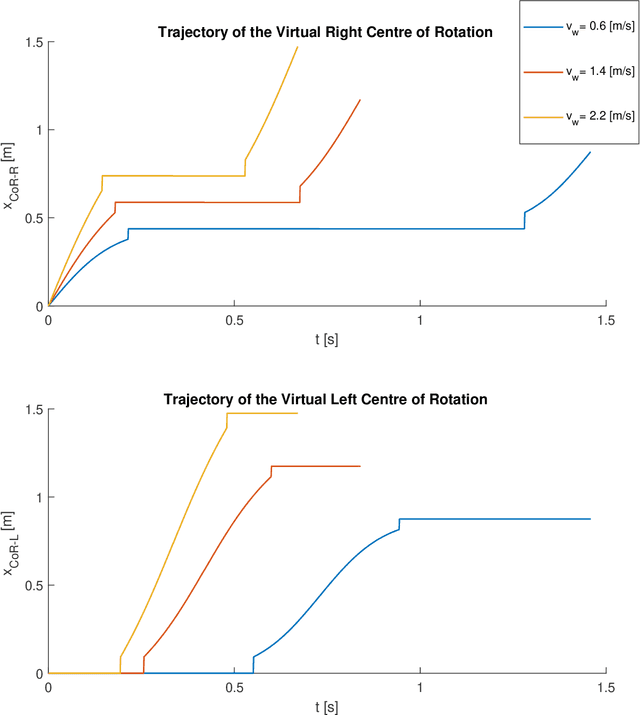
Despite decades of study, the mechanisms that determine human locomotion are still unknown, available models and motor control theories can only partially capture the phenomenon. This is probably the principal cause of the reduced efficacy of lower limbs rehabilitation therapies. Recently, it has been proposed that human locomotion may be planned in the task-space by taking advantage of the gravitational pull acting on the Centre of Mass (CoM) that we have used to formulate a task-space planner for straight locomotion at a constant speed. The proposed model represents the CoM transversal trajectory as simple harmonic oscillator moving forward at a constant speed. On the other hand, the vertical trajectory of the CoM is controlled through the ankle strategies. Our solution is composed of closed-form equations which can plan human-like trajectories for both the CoM and the foot swing. The model output can be seen as the optimal trajectory determined based on the average behaviour of 12 healthy subjects walking at three self-selected speeds. Furthermore, the planner formulation is compatible with an extended formulation of the Passive Motion Paradigm which enables us to design a hierarchical architecture of semi-autonomous controllers. The final architecture can also describe the motor primitives as a particular case of dynamic primitives, shows strong parallels with the nervous system organization, and is compatible with the optimal feedback controller theory.