 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOSOG: A Differentiable, Physics-Informed Synthetic Data Engine for Micro-Optical Environments
Jun 19, 2026Deep learning in computational microscopy is severely constrained by the scarcity of densely annotated datasets. While synthetic data generation has bridged this gap in macroscopic computer vision, traditional graphics engines rely on geometric ray-tracing, failing to capture the micro-optical phenomena required for microscopy. Conversely, while wave-optics formulations exist, rendering them computationally tractable at the scale required for deep learning remains a massive systems challenge. To address this, we introduce the Optical Synthetic Object Generator (OSOG), a high-performance, fully differentiable forward-modeling engine. Drawing on established physical models of diffraction and phase retardation, OSOG maps continuous Optical Path Difference (OPD) calculations into a highly optimized, PyTorch-native Structure-of-Arrays (SoA) architecture. We validate this computational framework across three axes: First, object detection models (YOLOv11-OBB) trained purely on OSOG-generated data achieve robust zero-shot transfer to real-world highly occluded Lysozyme micrographs. Second, we introduce DiffOSOG, demonstrating that the engine's end-to-end differentiability allows for the exact recovery of continuous optical parameters via curriculum-guided inverse rendering. Finally, OSOG bypasses the $\mathcal{O}(N)$ bottlenecks of sequential ray-tracing, demonstrating sub-linear scaling by synthesizing 40,000 complex wave-optic particles in under 50 milliseconds (\>20 FPS). By providing a fast, scalable, and physically grounded tensor pipeline, OSOG enables true real-time, on-the-fly dataset generation.
A Framework for Closed-Loop Robotic Assembly, Alignment and Self-Recovery of Precision Optical Systems
Mar 23, 2026Robotic automation has transformed scientific workflows in domains such as chemistry and materials science, yet free-space optics, which is a high precision domain, remains largely manual. Optical systems impose strict spatial and angular tolerances, and their performance is governed by tightly coupled physical parameters, making generalizable automation particularly challenging. In this work, we present a robotics framework for the autonomous construction, alignment, and maintenance of precision optical systems. Our approach integrates hierarchical computer vision systems, optimization routines, and custom-built tools to achieve this functionality. As a representative demonstration, we perform the fully autonomous construction of a tabletop laser cavity from randomly distributed components. The system performs several tasks such as laser beam centering, spatial alignment of multiple beams, resonator alignment, laser mode selection, and self-recovery from induced misalignment and disturbances. By achieving closed-loop autonomy for highly sensitive optical systems, this work establishes a foundation for autonomous optical experiments for applications across technical domains.
Fully Convolutional Open Set Segmentation
Jun 25, 2020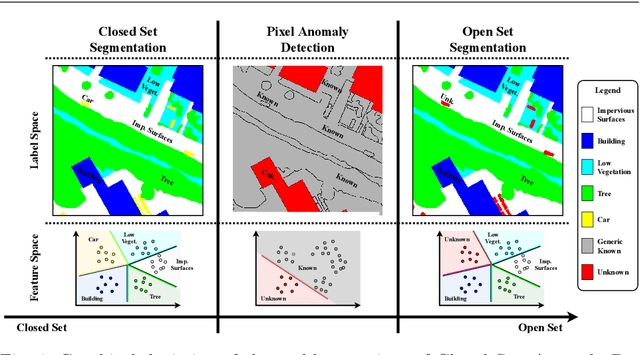
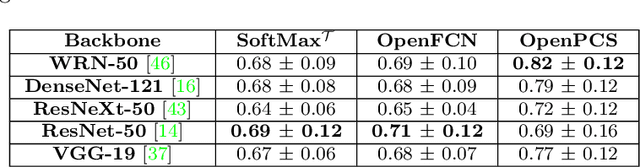
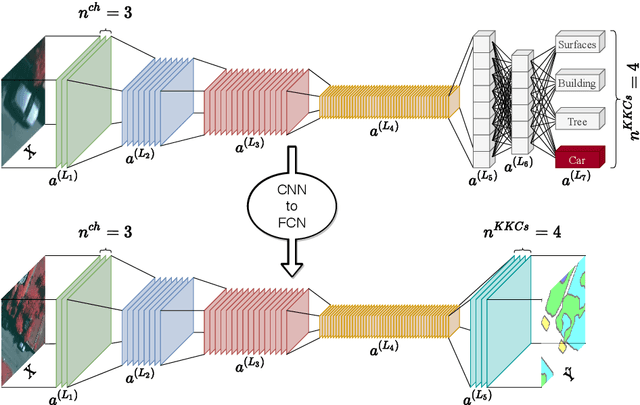
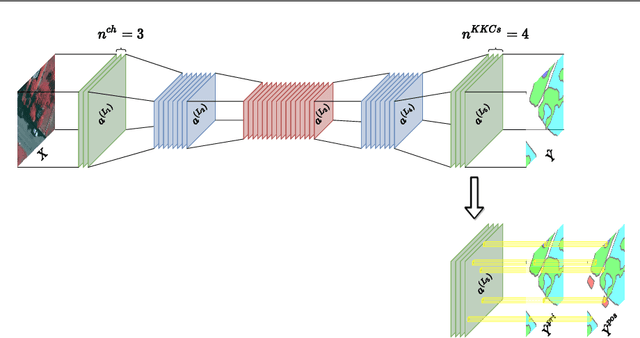
In semantic segmentation knowing about all existing classes is essential to yield effective results with the majority of existing approaches. However, these methods trained in a Closed Set of classes fail when new classes are found in the test phase. It means that they are not suitable for Open Set scenarios, which are very common in real-world computer vision and remote sensing applications. In this paper, we discuss the limitations of Closed Set segmentation and propose two fully convolutional approaches to effectively address Open Set semantic segmentation: OpenFCN and OpenPCS. OpenFCN is based on the well-known OpenMax algorithm, configuring a new application of this approach in segmentation settings. OpenPCS is a fully novel approach based on feature-space from DNN activations that serve as features for computing PCA and multi-variate gaussian likelihood in a lower dimensional space. Experiments were conducted on the well-known Vaihingen and Potsdam segmentation datasets. OpenFCN showed little-to-no improvement when compared to the simpler and much more time efficient SoftMax thresholding, while being between some orders of magnitude slower. OpenPCS achieved promising results in almost all experiments by overcoming both OpenFCN and SoftMax thresholding. OpenPCS is also a reasonable compromise between the runtime performances of the extremely fast SoftMax thresholding and the extremely slow OpenFCN, being close able to run close to real-time. Experiments also indicate that OpenPCS is effective, robust and suitable for Open Set segmentation, being able to improve the recognition of unknown class pixels without reducing the accuracy on the known class pixels.