 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAvoidance of an unexpected obstacle without reinforcement learning: Why not using advanced control-theoretic tools?
Sep 03, 2025



This communication on collision avoidance with unexpected obstacles is motivated by some critical appraisals on reinforcement learning (RL) which "requires ridiculously large numbers of trials to learn any new task" (Yann LeCun). We use the classic Dubins' car in order to replace RL with flatness-based control, combined with the HEOL feedback setting, and the latest model-free predictive control approach. The two approaches lead to convincing computer experiments where the results with the model-based one are only slightly better. They exhibit a satisfactory robustness with respect to randomly generated mismatches/disturbances, which become excellent in the model-free case. Those properties would have been perhaps difficult to obtain with today's popular machine learning techniques in AI. Finally, we should emphasize that our two methods require a low computational burden.
Guidance and Control of Unmanned Surface Vehicles via HEOL
Apr 30, 2025This work presents a new approach to the guidance and control of marine craft via HEOL, i.e., a new way of combining flatness-based and model-free controllers. Its goal is to develop a general regulator for Unmanned Surface Vehicles (USV). To do so, the well-known USV maneuvering model is simplified into a nominal Hovercraft model which is flat. A flatness-based controller is derived for the simplified USV model and the loop is closed via an intelligent proportional-derivative (iPD) regulator. We thus associate the well-documented natural robustness of flatness-based control and adaptivity of iPDs. The controller is applied in simulation to two surface vessels, one meeting the simplifying hypotheses, the other one being a generic USV of the literature. It is shown to stabilize both systems even in the presence of unmodeled environmental disturbances.
La production de nitrites lors de la dénitrification des eaux usées par biofiltration - Stratégie de contrôle et de réduction des concentrations résiduelles
Nov 28, 2017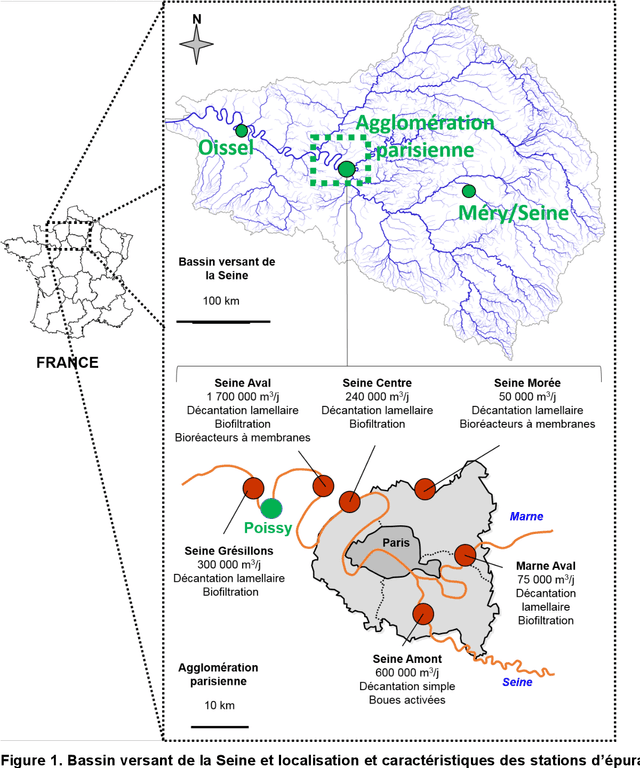
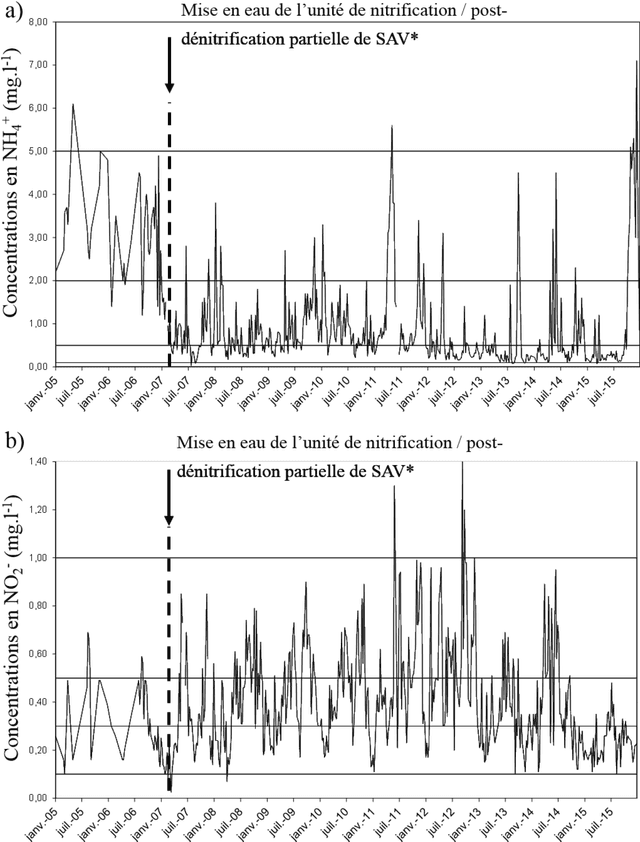
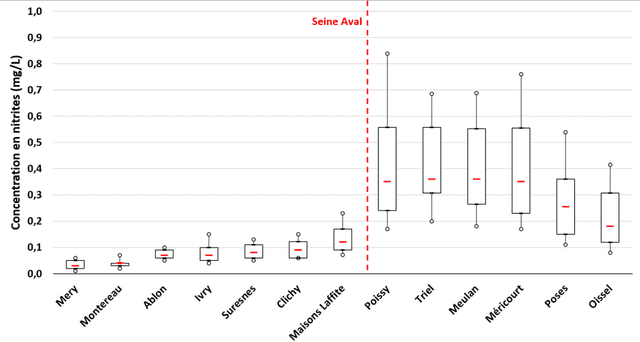
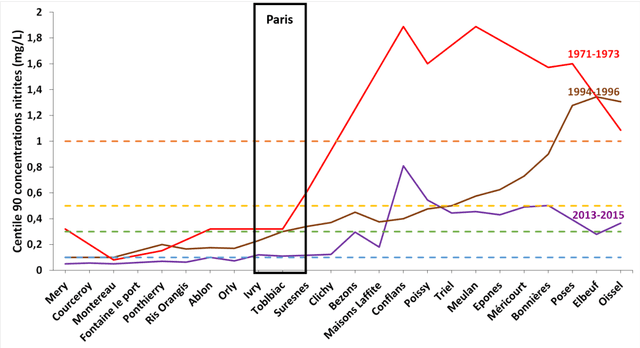
The recent popularity of post-denitrification processes in the greater Paris area wastewater treatment plants has caused a resurgence of the presence of nitrite in the Seine river. Controlling the production of nitrite during the post-denitrification has thus become a major technical issue. Research studies have been led in the MOCOPEE program (www.mocopee.com) to better understand the underlying mechanisms behind the production of nitrite during wastewater denitrification and to develop technical tools (measurement and control solutions) to assist on-site reductions of nitrite productions. Prior studies have shown that typical methanol dosage strategies produce a varying carbon-to-nitrogen ratio in the reactor, which in turn leads to unstable nitrite concentrations in the effluent. The possibility of adding a model-free control to the actual classical dosage strategy has thus been tested on the SimBio model, which simulates the behavior of wastewater biofilters. The corresponding "intelligent" feedback loop, which is using effluent nitrite concentrations, compensates the classical strategy only when needed. Simulation results show a clear improvement in average nitrite concentration level and level stability in the effluent, without a notable overcost in methanol.
* in french, Journal of Water Science, to appear
Un résultat intrigant en commande sans modèle
Nov 08, 2017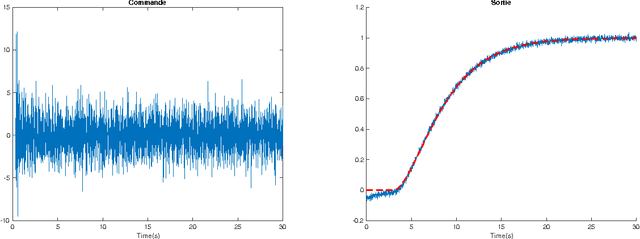
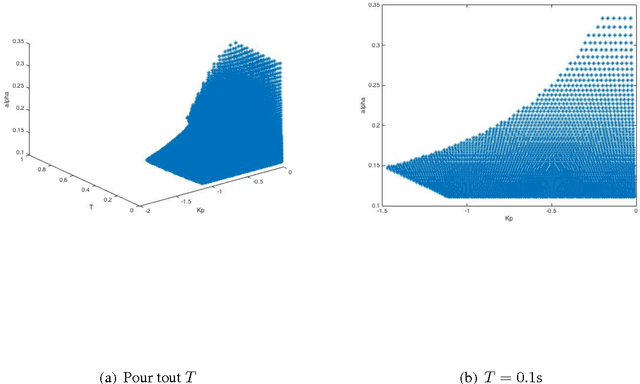
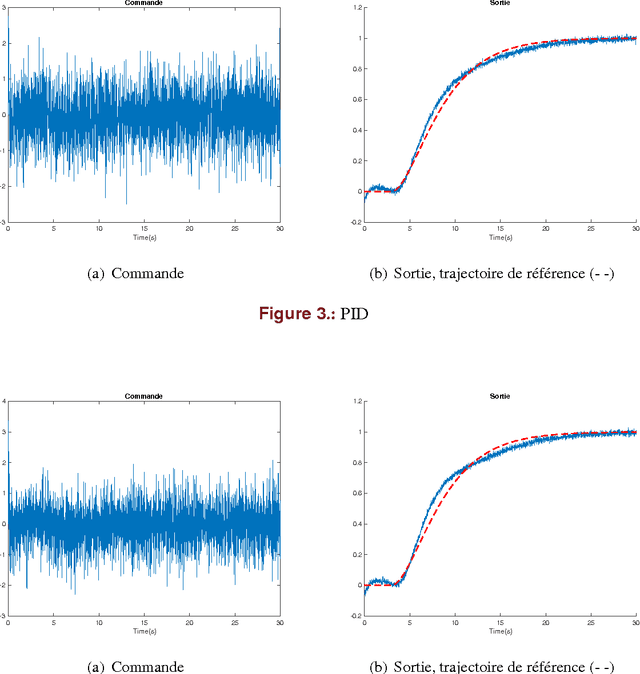
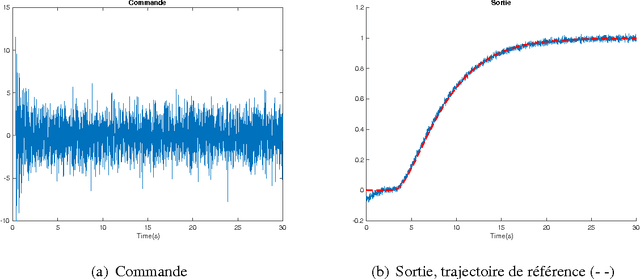
An elementary mathematical example proves, thanks to the Routh-Hurwitz criterion, a result that is intriguing with respect to today's practical understanding of model-free control, i.e., an "intelligent" proportional controller (iP) may turn to be more difficult to tune than an intelligent proportional-derivative one (iPD). The vast superiority of iPDs when compared to classic PIDs is shown via computer simulations. The introduction as well as the conclusion analyse model-free control in the light of recent advances.
* in French, https://www.openscience.fr/Un-resultat-intrigant-en-commande-sans-modele
Energy saving for building heating via a simple and efficient model-free control design: First steps with computer simulations
Sep 06, 2017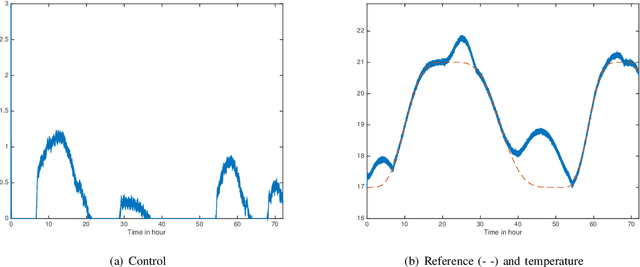
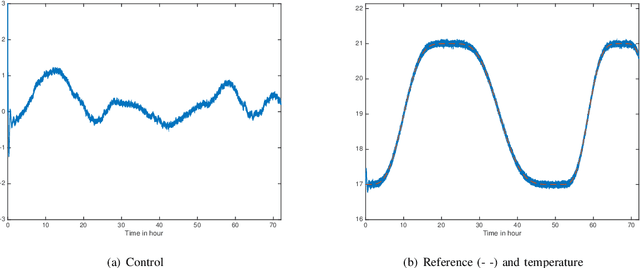
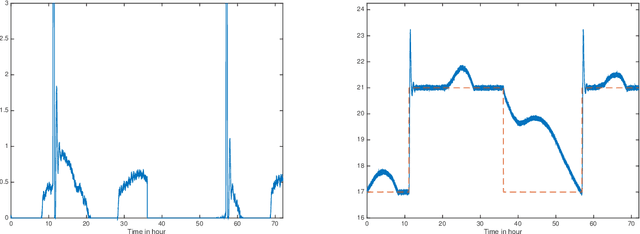
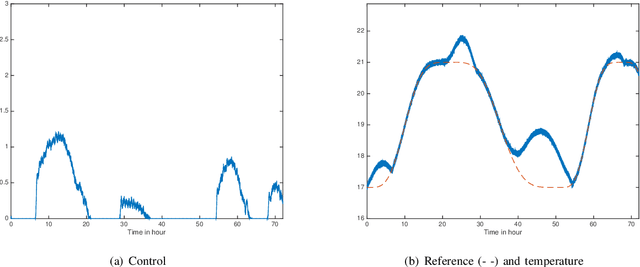
The model-based control of building heating systems for energy saving encounters severe physical, mathematical and calibration difficulties in the numerous attempts that has been published until now. This topic is addressed here via a new model-free control setting, where the need of any mathematical description disappears. Several convincing computer simulations are presented. Comparisons with classic PI controllers and flatness-based predictive control are provided.
Short-term solar irradiance and irradiation forecasts via different time series techniques: A preliminary study
Sep 26, 2014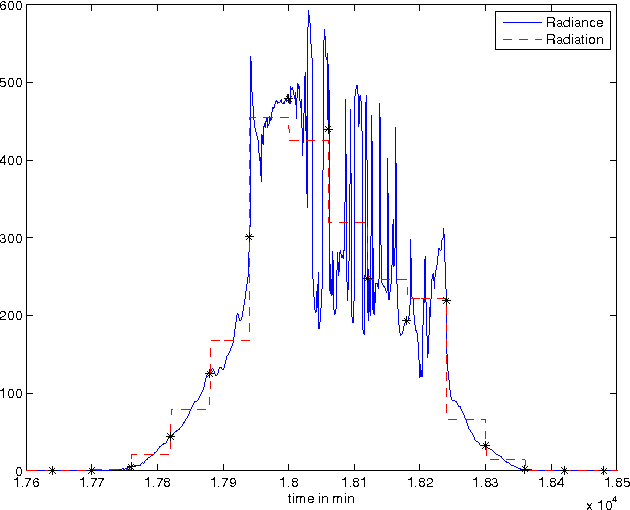
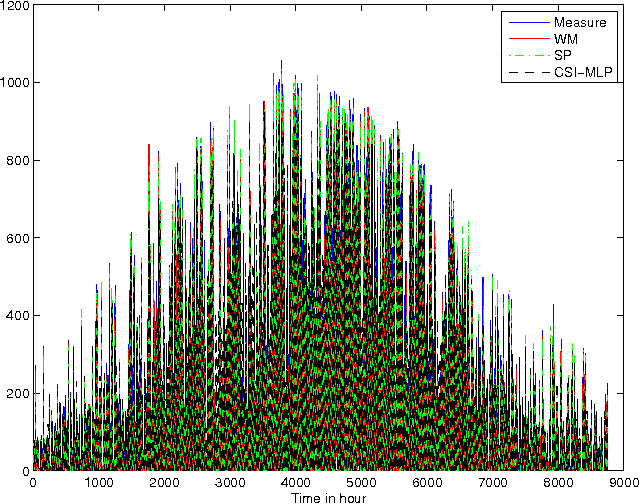
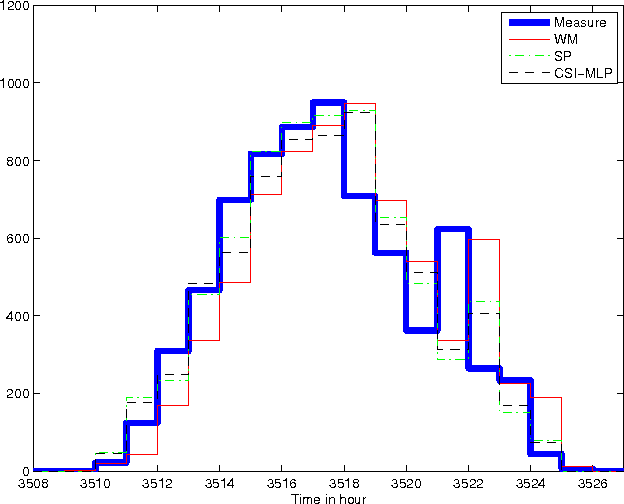
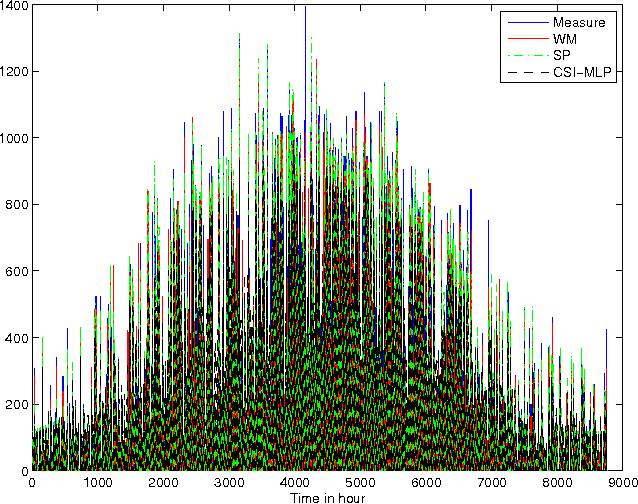
This communication is devoted to solar irradiance and irradiation short-term forecasts, which are useful for electricity production. Several different time series approaches are employed. Our results and the corresponding numerical simulations show that techniques which do not need a large amount of historical data behave better than those which need them, especially when those data are quite noisy.
Systematic and multifactor risk models revisited
Dec 18, 2013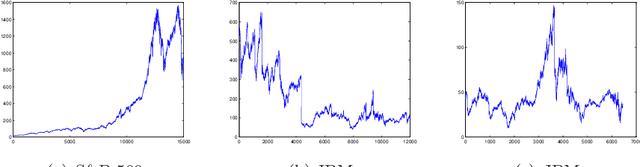
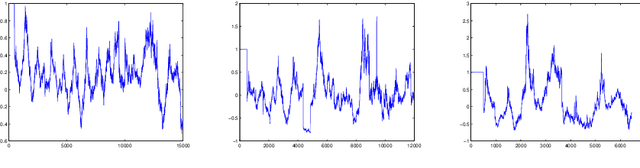
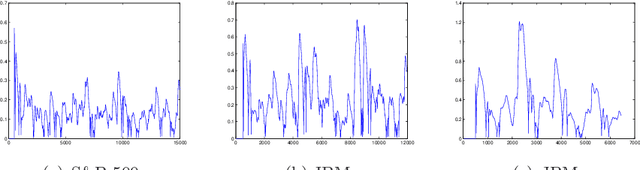
Systematic and multifactor risk models are revisited via methods which were already successfully developed in signal processing and in automatic control. The results, which bypass the usual criticisms on those risk modeling, are illustrated by several successful computer experiments.
Vers une commande multivariable sans modèle
Dec 21, 2007A control strategy without any precise mathematical model is derived for linear or nonlinear systems which are assumed to be finite-dimensional. Two convincing numerical simulations are provided.