 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Motion Detection Based on Dual-Graph and Weighted Nuclear Norm Regularizations
Apr 10, 2023



Motion detection has been widely used in many applications, such as surveillance and robotics. Due to the presence of the static background, a motion video can be decomposed into a low-rank background and a sparse foreground. Many regularization techniques that preserve low-rankness of matrices can therefore be imposed on the background. In the meanwhile, geometry-based regularizations, such as graph regularizations, can be imposed on the foreground. Recently, weighted regularization techniques including the weighted nuclear norm regularization have been proposed in the image processing community to promote adaptive sparsity while achieving efficient performance. In this paper, we propose a robust dual graph regularized moving object detection model based on a novel weighted nuclear norm regularization and spatiotemporal graph Laplacians. Numerical experiments on realistic human motion data sets have demonstrated the effectiveness and robustness of this approach in separating moving objects from background, and the enormous potential in robotic applications.
Robust Dual-Graph Regularized Moving Object Detection
Apr 25, 2022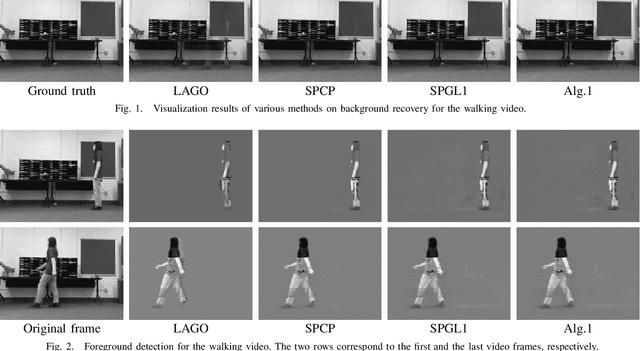
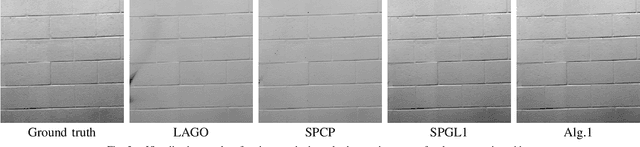
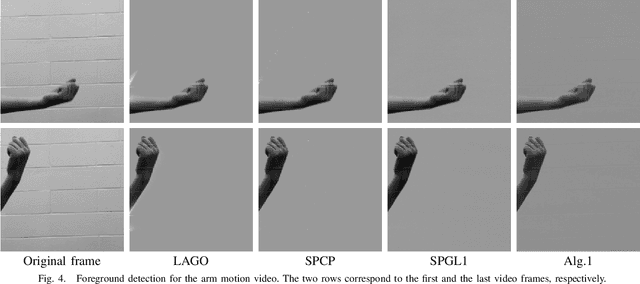
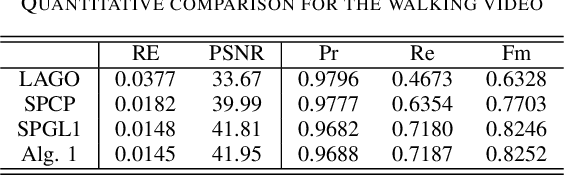
Moving object detection and its associated background-foreground separation have been widely used in a lot of applications, including computer vision, transportation and surveillance. Due to the presence of the static background, a video can be naturally decomposed into a low-rank background and a sparse foreground. Many regularization techniques, such as matrix nuclear norm, have been imposed on the background. In the meanwhile, sparsity or smoothness based regularizations, such as total variation and $\ell_1$, can be imposed on the foreground. Moreover, graph Laplacians are further imposed to capture the complicated geometry of background images. Recently, weighted regularization techniques including the weighted nuclear norm regularization have been proposed in the image processing community to promote adaptive sparsity while achieving efficient performance. In this paper, we propose a robust dual-graph regularized moving object detection model based on the weighted nuclear norm regularization, which is solved by the alternating direction method of multipliers (ADMM). Numerical experiments on body movement data sets have demonstrated the effectiveness of this method in separating moving objects from background, and the great potential in robotic applications.
Hand Gesture Recognition Based on a Nonconvex Regularization
Apr 30, 2021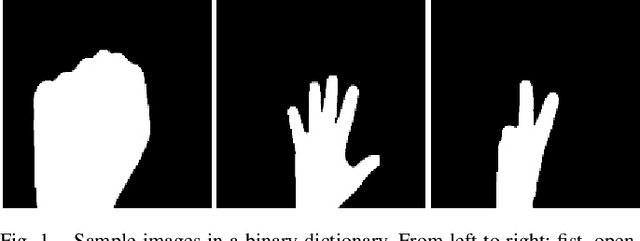
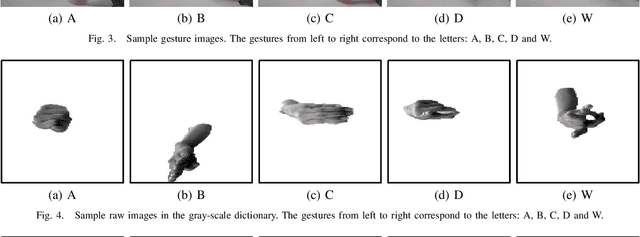
Recognition of hand gestures is one of the most fundamental tasks in human-robot interaction. Sparse representation based methods have been widely used due to their efficiency and low requirements on the training data. Recently, nonconvex regularization techniques including the $\ell_{1-2}$ regularization have been proposed in the image processing community to promote sparsity while achieving efficient performance. In this paper, we propose a vision-based hand gesture recognition model based on the $\ell_{1-2}$ regularization, which is solved by the alternating direction method of multipliers (ADMM). Numerical experiments on binary and gray-scale data sets have shown the effectiveness of this method in identifying hand gestures.