 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural 3D Object Reconstruction with Small-Scale Unmanned Aerial Vehicles
Sep 15, 2025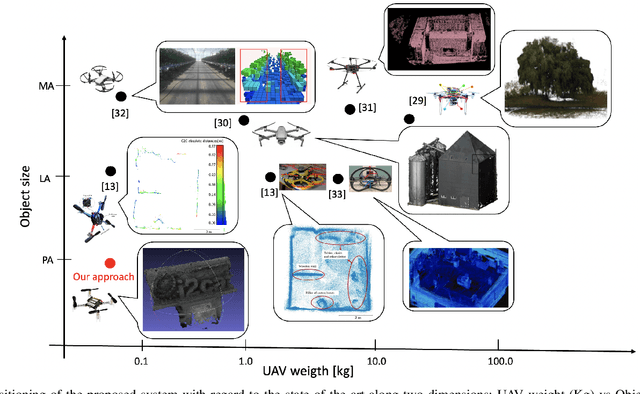
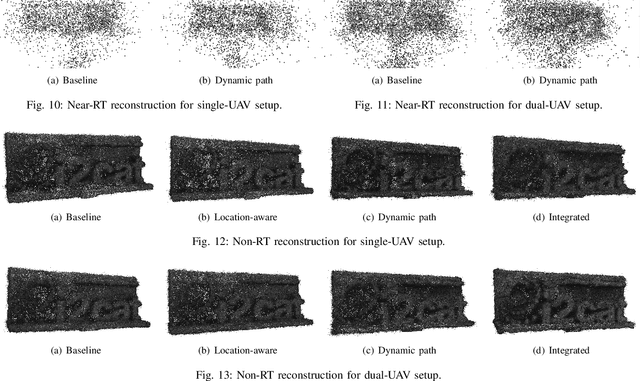
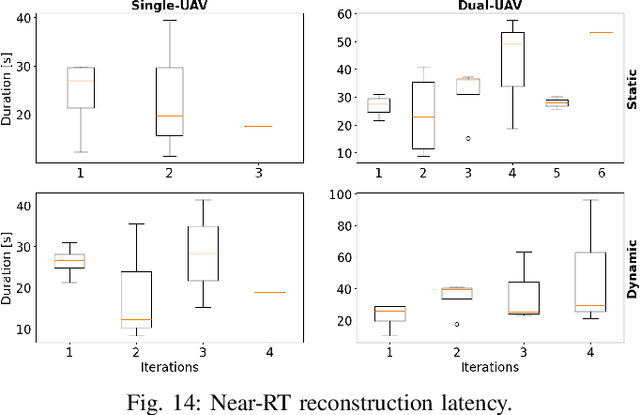
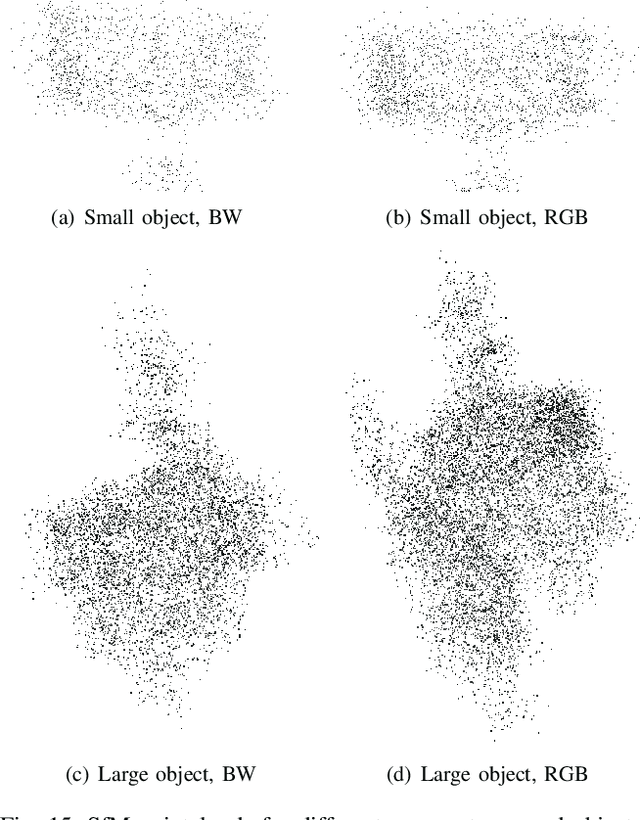
Small Unmanned Aerial Vehicles (UAVs) exhibit immense potential for navigating indoor and hard-to-reach areas, yet their significant constraints in payload and autonomy have largely prevented their use for complex tasks like high-quality 3-Dimensional (3D) reconstruction. To overcome this challenge, we introduce a novel system architecture that enables fully autonomous, high-fidelity 3D scanning of static objects using UAVs weighing under 100 grams. Our core innovation lies in a dual-reconstruction pipeline that creates a real-time feedback loop between data capture and flight control. A near-real-time (near-RT) process uses Structure from Motion (SfM) to generate an instantaneous pointcloud of the object. The system analyzes the model quality on the fly and dynamically adapts the UAV's trajectory to intelligently capture new images of poorly covered areas. This ensures comprehensive data acquisition. For the final, detailed output, a non-real-time (non-RT) pipeline employs a Neural Radiance Fields (NeRF)-based Neural 3D Reconstruction (N3DR) approach, fusing SfM-derived camera poses with precise Ultra Wide-Band (UWB) location data to achieve superior accuracy. We implemented and validated this architecture using Crazyflie 2.1 UAVs. Our experiments, conducted in both single- and multi-UAV configurations, conclusively show that dynamic trajectory adaptation consistently improves reconstruction quality over static flight paths. This work demonstrates a scalable and autonomous solution that unlocks the potential of miniaturized UAVs for fine-grained 3D reconstruction in constrained environments, a capability previously limited to much larger platforms.
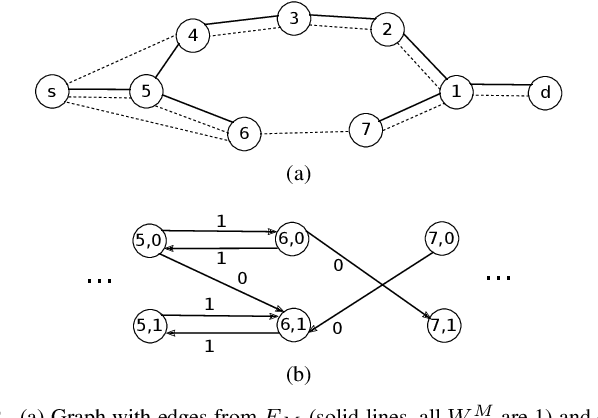
Multi-robot persistent surveillance with connectivity constraints
Sep 17, 2019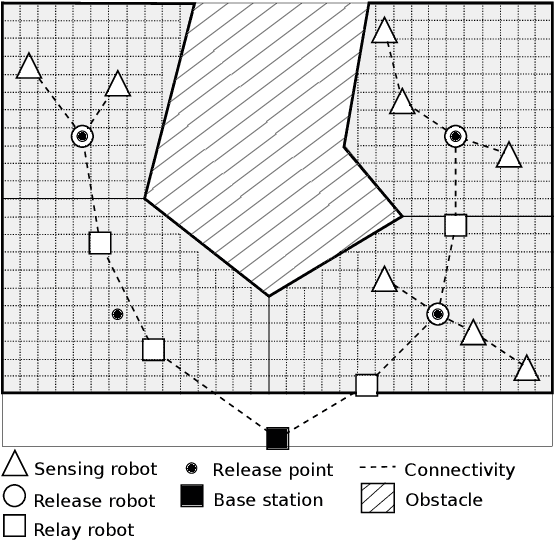
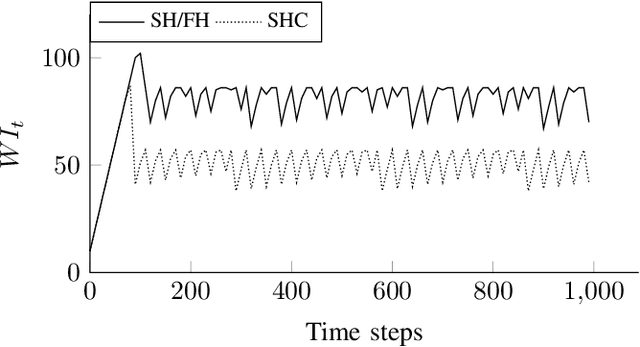
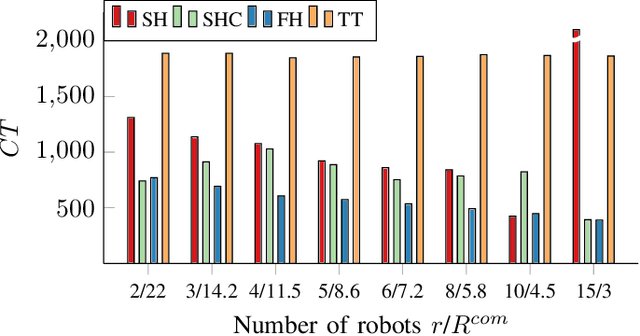
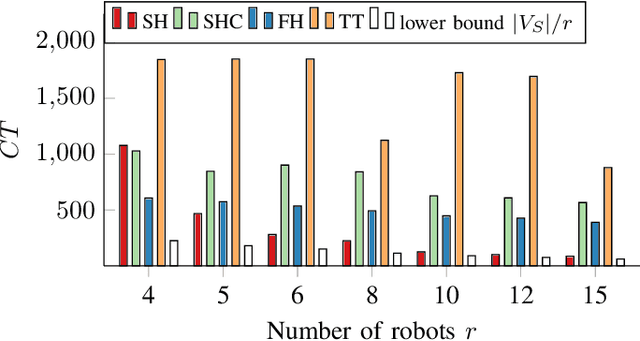
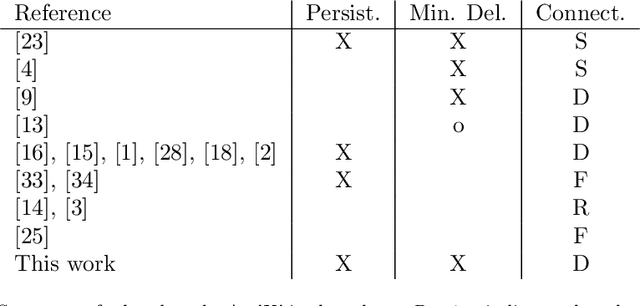
Mobile robots, especially unmanned aerial vehicles (UAVs), are of increasing interest for surveillance and disaster response scenarios. We consider the problem of multi-robot persistent surveillance with connectivity constraints where robots have to visit sensing locations periodically and maintain a multi-hop connection to a base station. We formally define several problem instances closely related to multi-robot persistent surveillance with connectivity constraints, i.e., connectivity-constrained multi-robot persistent surveillance (CMPS), connectivity-constrained multi-robot reachability (CMR), and connectivity-constrained multi-robot reachability with relay dropping (CMRD), and show that they are all NP-hard on general graph. We introduce three heuristics with different planning horizons for convex grid graphs and combine these with a tree traversal approach which can be applied to a partitioning of non-convex grid graphs (CMPS with tree traversal, CMPSTT). In simulation studies we show that a short horizon greedy approach, which requires parameters to be optimized beforehand, can outperform a full horizon approach, which requires a tour through all sensing locations, if the number of robots is larger than the minimum number of robots required to reach all sensing locations. The minimum number required is the number of robots necessary for building a chain to the farthest sensing location from the base station. Furthermore, we show that partitioning the area and applying the tree traversal approach can achieve a performance similar to the unpartitioned case up to a certain number of robots but requires less optimization time.
Persistent Multi-UAV Surveillance with Data Latency Constraints
Jul 02, 2019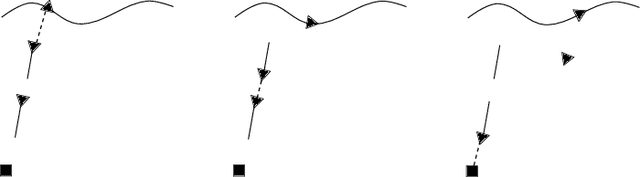
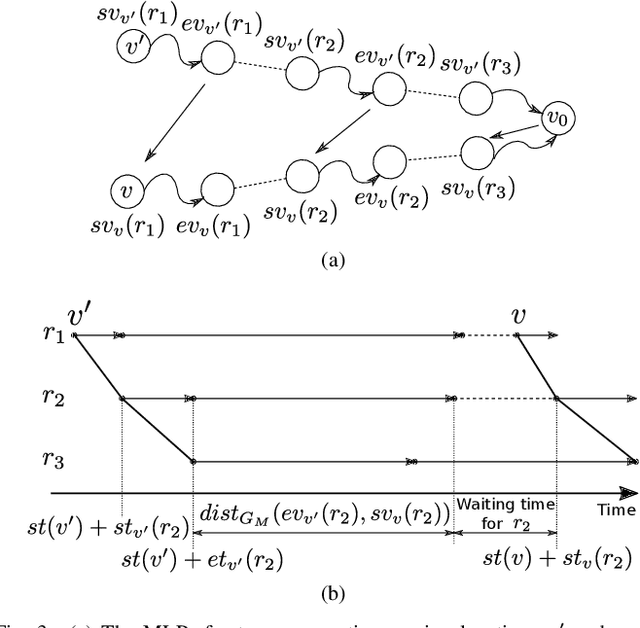
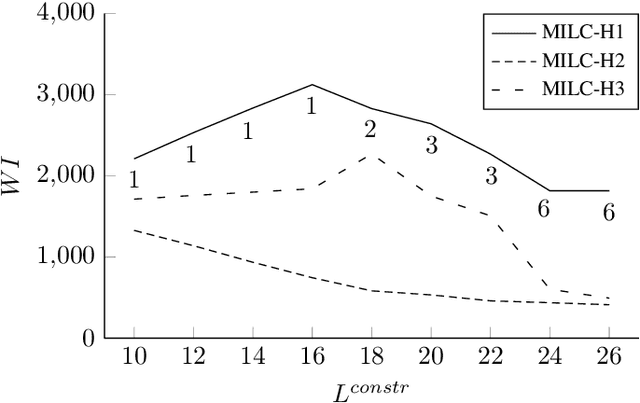
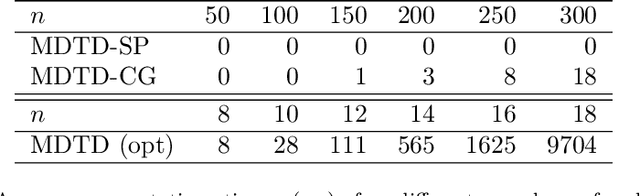
We discuss surveillance with multiple unmanned aerial vehicles (UAV) that minimize idleness (the time between consecutive visits of sensing locations) and constrain latency (the time between capturing data at a sensing location and its arrival at the base station). This is important in persistent surveillance scenarios where sensing locations should not only be visited periodically, but the captured data also should reach the base station in due time even if the area is larger than the communication range. Our approach employs the concept of minimum-latency paths (MLP) to guarantee that the data reaches the base station within a predefined latency bound. To reach the bound, multiple UAVs cooperatively transport the data in a store-and-forward fashion. Additionally, MLPs specify a lower bound for any latency minimization problem where multiple mobile agents transport data in a store-and-forward fashion. We introduce three variations of a heuristic employing MLPs and compare their performance in a simulation study. The results show that extensions of the simplest of our approaches, where data is transported after each visit of a sensing location, show improved performance and the tradeoff between latency and idleness.
Multi-Robot Patrolling with Sensing Idleness and Data Delay Objectives
Jun 27, 2019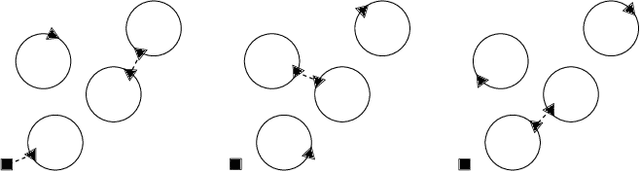
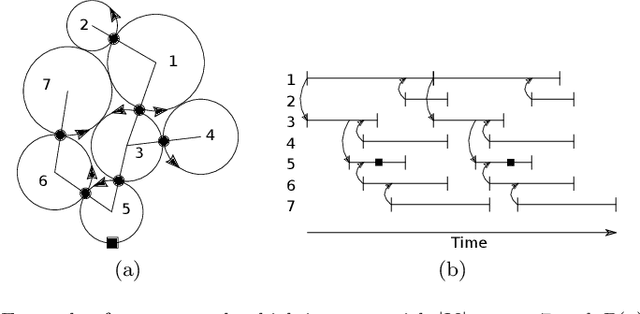
Multi-robot patrolling represents a fundamental problem for many monitoring and surveillance applications and has gained significant interest in recent years. In patrolling, mobile robots repeatedly travel through an environment, capture sensor data at certain sensing locations and deliver this data to the base station in a way that maximizes the changes of detection. Robots move on tours, exchange data when they meet with robots on neighboring tours and so eventually deliver data to the base station. In this paper we jointly consider two important optimization criteria of multi-robot patrolling: (i) idleness, i.e. the time between consecutive visits of sensing locations, and (ii) delay, i.e. the time between capturing data at the sensing location and its arrival at the base station. We systematically investigate the effect of the robots' moving directions along their tours and the selection of meeting points for data exchange. We prove that the problem of determining the movement directions and meeting points such that the data delay is minimized is NP-hard. We propose heuristics and provide a simulation study which shows that the cooperative approach can outperform an uncooperative approach where every robot delivers the captured data individually to the base station.
Concealing the identity of faces in oblique images with adaptive hopping Gaussian mixtures
Oct 29, 2018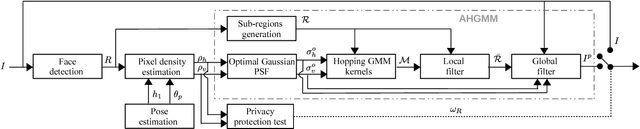
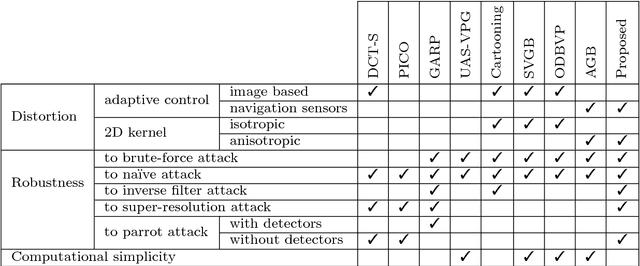
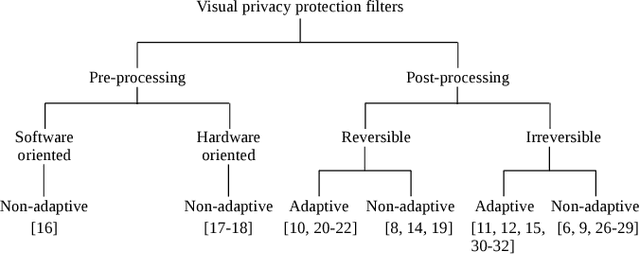
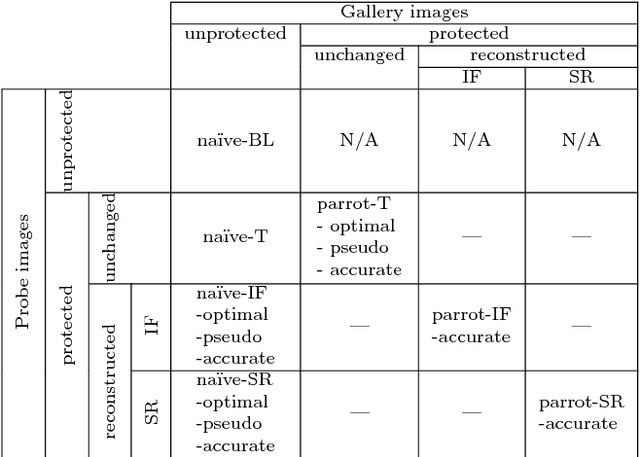
Cameras mounted on Micro Aerial Vehicles (MAVs) are increasingly used for recreational photography. However, aerial photographs of public places often contain faces of bystanders thus leading to a perceived or actual violation of privacy. To address this issue, we propose to pseudo-randomly modify the appearance of face regions in the images using a privacy filter that prevents a human or a face recogniser from inferring the identities of people. The filter, which is applied only when the resolution is high enough for a face to be recognisable, adaptively distorts the face appearance as a function of its resolution. Moreover, the proposed filter locally changes its parameters to discourage attacks that use parameter estimation. The filter exploits both global adaptiveness to reduce distortion and local hopping of the parameters to make their estimation difficult for an attacker. In order to evaluate the efficiency of the proposed approach, we use a state-of-the-art face recognition algorithm and synthetically generated face data with 3D geometric image transformations that mimic faces captured from an MAV at different heights and pitch angles. Experimental results show that the proposed filter protects privacy while reducing distortion and exhibits resilience against attacks.