 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMetaGen: A DSL, Database, and Benchmark for VLM-Assisted Metamaterial Generation
Aug 25, 2025Metamaterials are micro-architected structures whose geometry imparts highly tunable-often counter-intuitive-bulk properties. Yet their design is difficult because of geometric complexity and a non-trivial mapping from architecture to behaviour. We address these challenges with three complementary contributions. (i) MetaDSL: a compact, semantically rich domain-specific language that captures diverse metamaterial designs in a form that is both human-readable and machine-parsable. (ii) MetaDB: a curated repository of more than 150,000 parameterized MetaDSL programs together with their derivatives-three-dimensional geometry, multi-view renderings, and simulated elastic properties. (iii) MetaBench: benchmark suites that test three core capabilities of vision-language metamaterial assistants-structure reconstruction, property-driven inverse design, and performance prediction. We establish baselines by fine-tuning state-of-the-art vision-language models and deploy an omni-model within an interactive, CAD-like interface. Case studies show that our framework provides a strong first step toward integrated design and understanding of structure-representation-property relationships.
View2CAD: Reconstructing View-Centric CAD Models from Single RGB-D Scans
Apr 05, 2025



Parametric CAD models, represented as Boundary Representations (B-reps), are foundational to modern design and manufacturing workflows, offering the precision and topological breakdown required for downstream tasks such as analysis, editing, and fabrication. However, B-Reps are often inaccessible due to conversion to more standardized, less expressive geometry formats. Existing methods to recover B-Reps from measured data require complete, noise-free 3D data, which are laborious to obtain. We alleviate this difficulty by enabling the precise reconstruction of CAD shapes from a single RGB-D image. We propose a method that addresses the challenge of reconstructing only the observed geometry from a single view. To allow for these partial observations, and to avoid hallucinating incorrect geometry, we introduce a novel view-centric B-rep (VB-Rep) representation, which incorporates structures to handle visibility limits and encode geometric uncertainty. We combine panoptic image segmentation with iterative geometric optimization to refine and improve the reconstruction process. Our results demonstrate high-quality reconstruction on synthetic and real RGB-D data, showing that our method can bridge the reality gap.
SB-GCN: Structured BREP Graph Convolutional Network for Automatic Mating of CAD Assemblies
May 25, 2021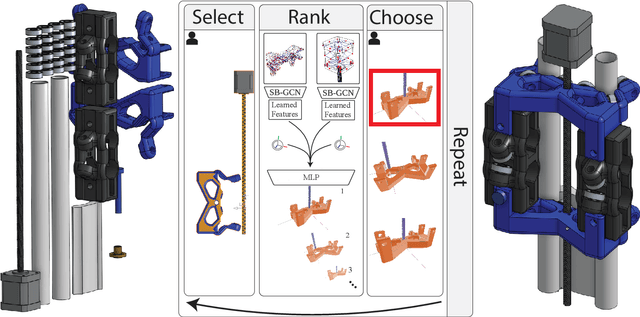
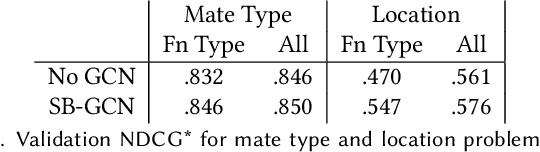
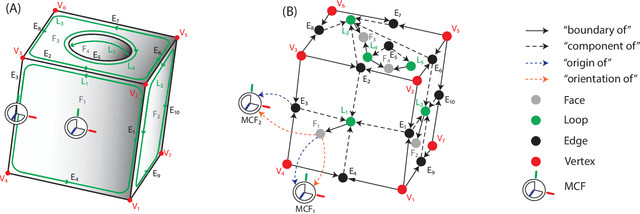
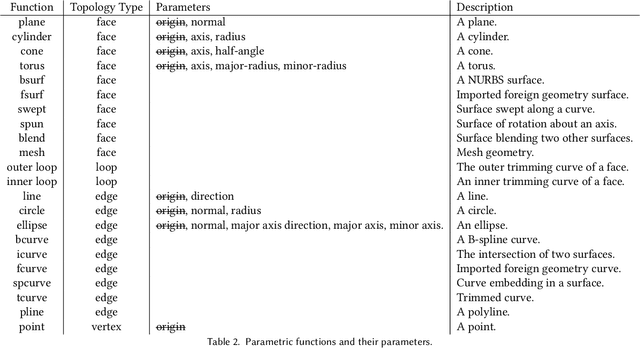
Assembly modeling is a core task of computer aided design (CAD), comprising around one third of the work in a CAD workflow. Optimizing this process therefore represents a huge opportunity in the design of a CAD system, but current research of assembly based modeling is not directly applicable to modern CAD systems because it eschews the dominant data structure of modern CAD: parametric boundary representations (BREPs). CAD assembly modeling defines assemblies as a system of pairwise constraints, called mates, between parts, which are defined relative to BREP topology rather than in world coordinates common to existing work. We propose SB-GCN, a representation learning scheme on BREPs that retains the topological structure of parts, and use these learned representations to predict CAD type mates. To train our system, we compiled the first large scale dataset of BREP CAD assemblies, which we are releasing along with benchmark mate prediction tasks. Finally, we demonstrate the compatibility of our model with an existing commercial CAD system by building a tool that assists users in mate creation by suggesting mate completions, with 72.2% accuracy.