 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Comparison of Visual and Single-Receiver GPS Odometry
Jun 08, 2021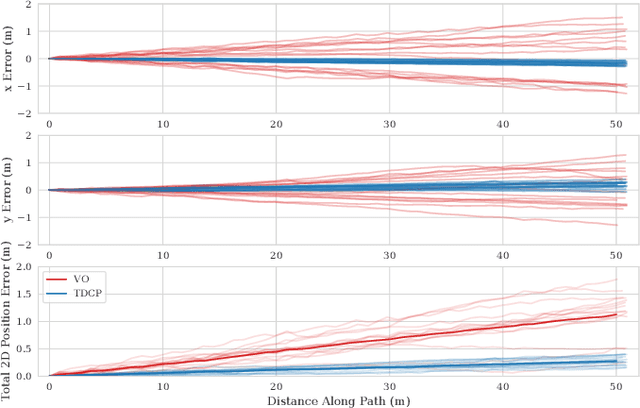
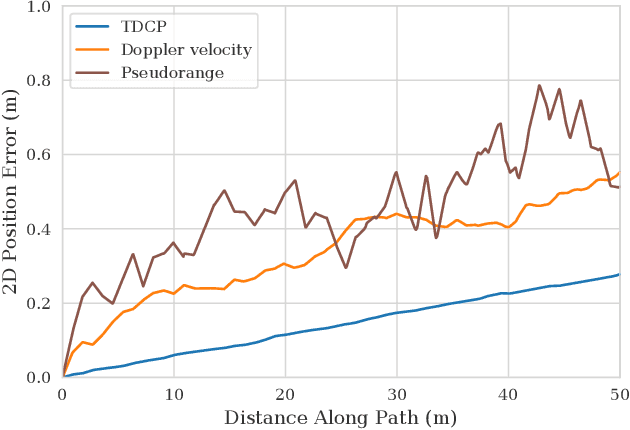
Mobile robots rely on odometry to navigate through areas where localization fails. Visual odometry (VO) is a common solution for obtaining robust and consistent relative motion estimates of the vehicle frame. Contrarily, Global Positioning System (GPS) measurements are typically used for absolute positioning and localization. However, when the constraint on absolute accuracy is relaxed, time-differenced carrier phase (TDCP) measurements can be used to find accurate relative position estimates with one single-frequency GPS receiver. This suggests practitioners may want to consider GPS odometry as an alternative or in combination with VO. We describe a robust method for single-receiver GPS odometry on an unmanned ground vehicle (UGV). We then present an experimental comparison of the two strategies on the same test trajectories. After 1.8km of testing, the results show our GPS odometry method has a 75% lower drift rate than a proven stereo VO method while maintaining a smooth error signal despite varying satellite availability.
Relatively Lazy: Indoor-Outdoor Navigation Using Vision and GNSS
Jan 13, 2021
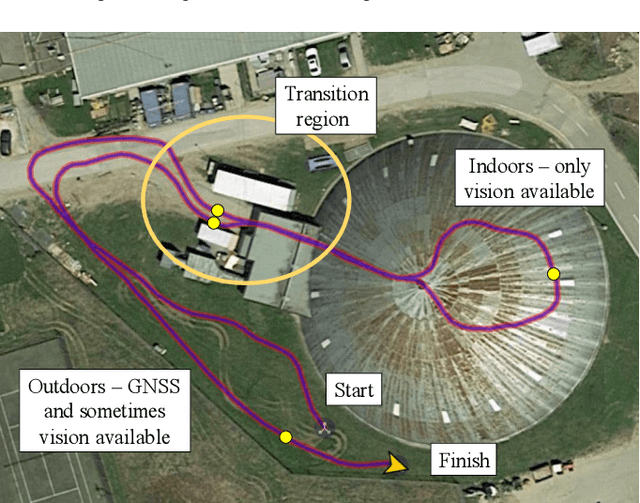
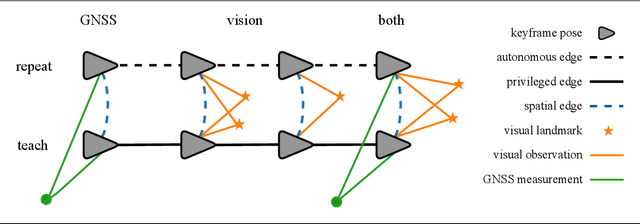
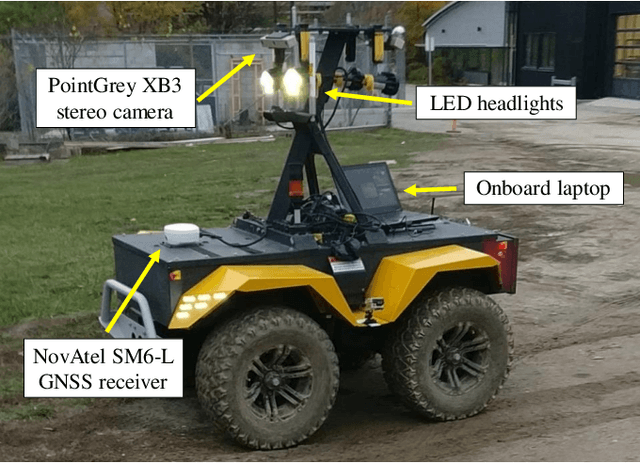
Visual Teach and Repeat (VT&R) has shown relative navigation is a robust and efficient solution for autonomous vision-based path following in difficult environments. Adding additional absolute sensors such as Global Navigation Satellite Systems (GNSS) has the potential to expand the domain of VT&R to environments where the ability to visually localize is not guaranteed. Our method of lazy mapping and delaying estimation until a path-tracking error is needed avoids the need to estimate absolute states. As a result, map optimization is not required and paths can be driven immediately after being taught. We validate our approach on a real robot through an experiment in a joint indoor-outdoor environment comprising 3.5km of autonomous route repeating across a variety of lighting conditions. We achieve smooth error signals throughout the runs despite large sections of dropout for each sensor.