 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed formation control for manipulator end-effectors
Jul 08, 2021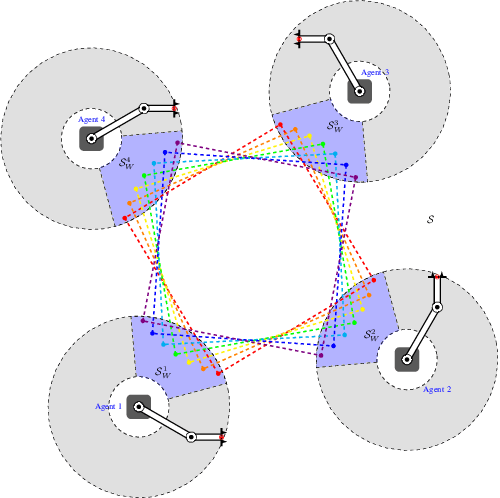
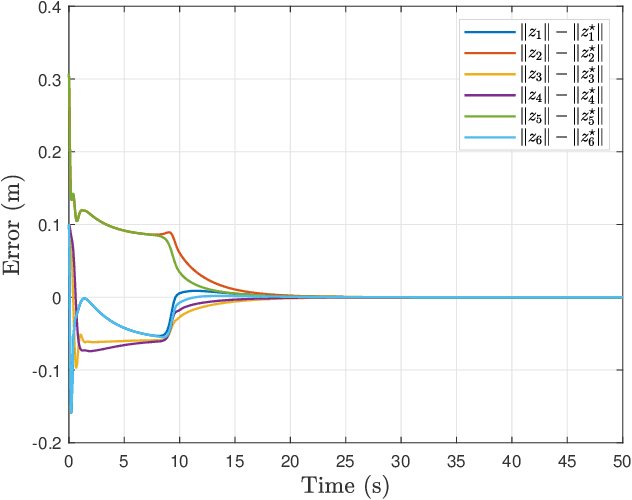
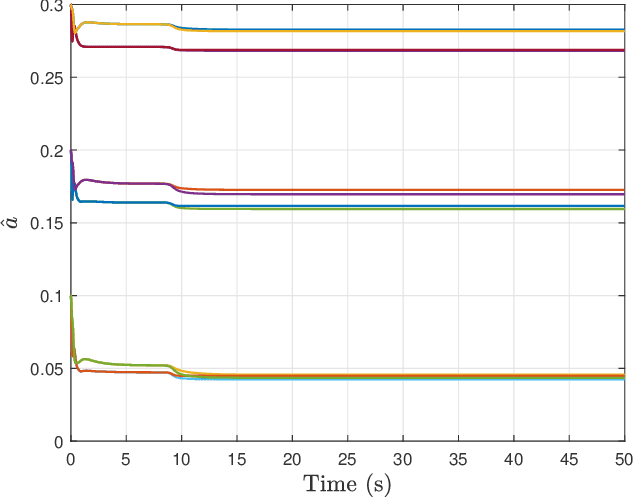
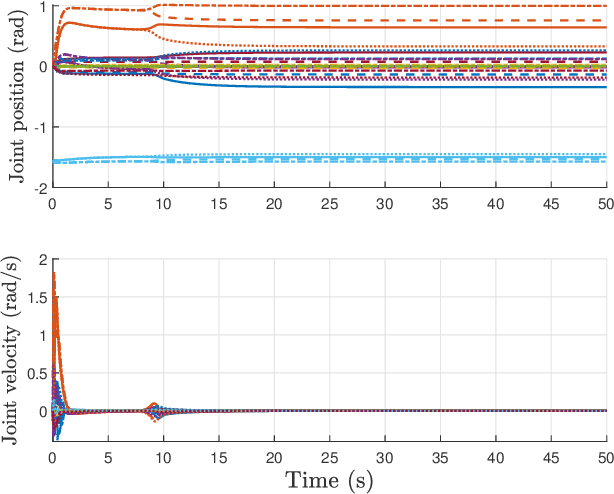
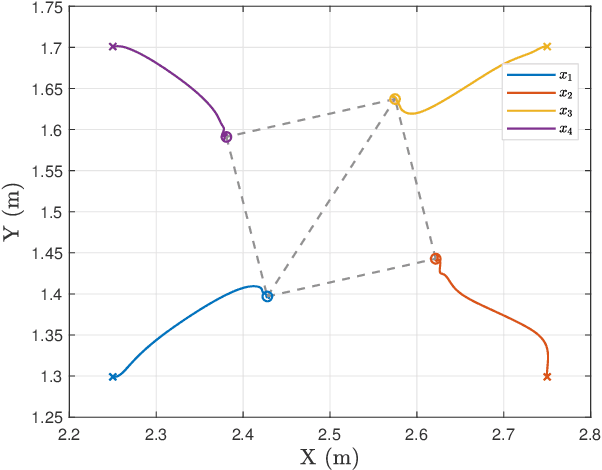
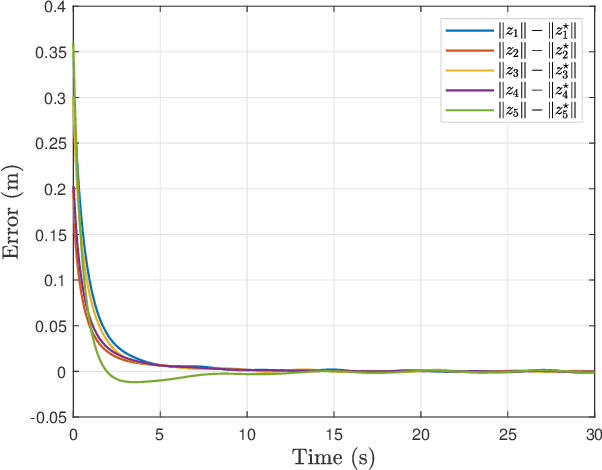
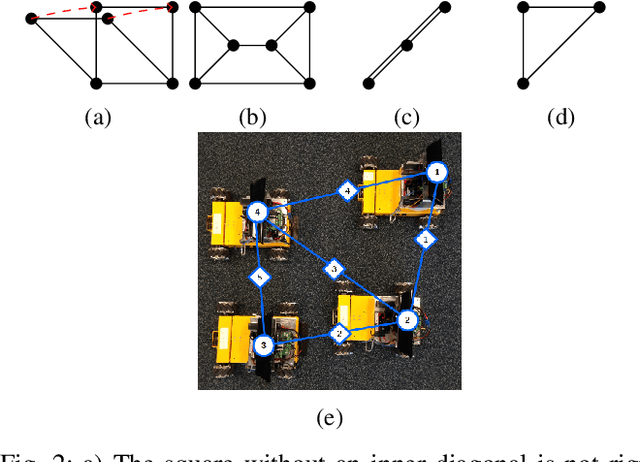
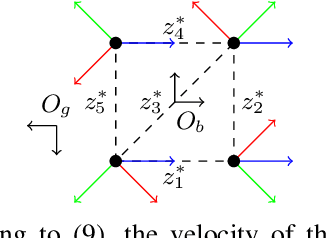
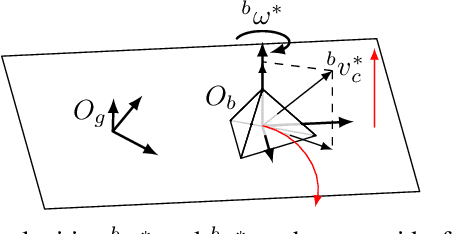
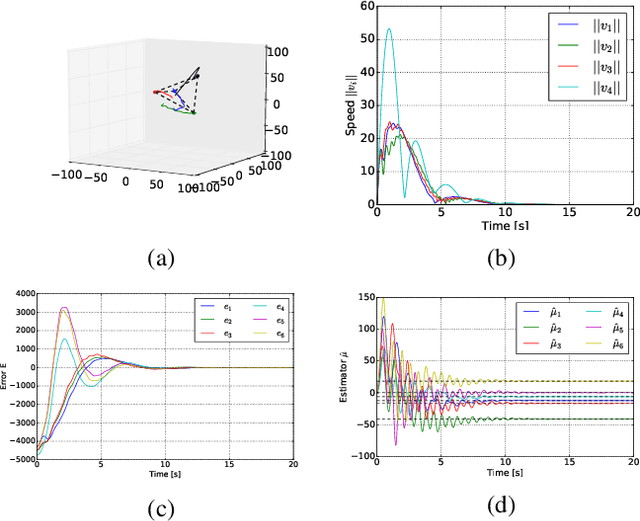
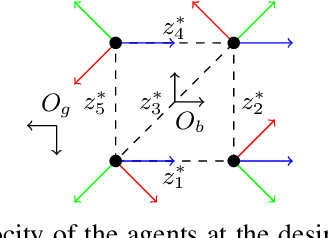
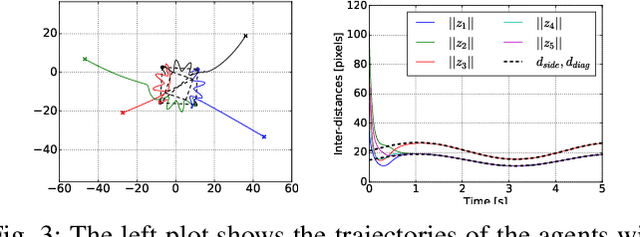
We present three classes of distributed formation controllers for achieving and maintaining the 2D/3D formation shape of manipulator end-effectors to cope with different scenarios due to availability of modeling parameters. We firstly present a distributed formation controller for manipulators whose system parameters are perfectly known. The formation control objective is achieved by assigning virtual springs between end-effectors and by adding damping terms at joints, which provides a clear physical interpretation of the proposed solution. Subsequently, we extend it to the case where manipulator kinematic and system parameters are not exactly known. An extra integrator and an adaptive estimator are introduced for gravitational compensation and stabilization, respectively. Simulation results with planar manipulators and with seven degree-of-freedom humanoid manipulator arms are presented to illustrate the effectiveness of the proposed approach.
Source Seeking Control of Unicycle Robots with 3D-printed Flexible Piezoresistive Sensors
Apr 29, 2021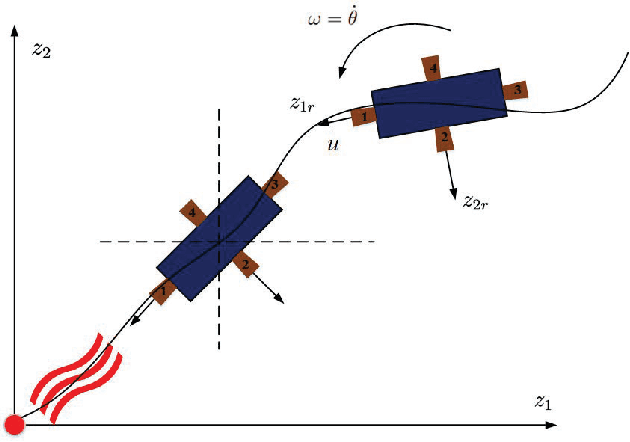
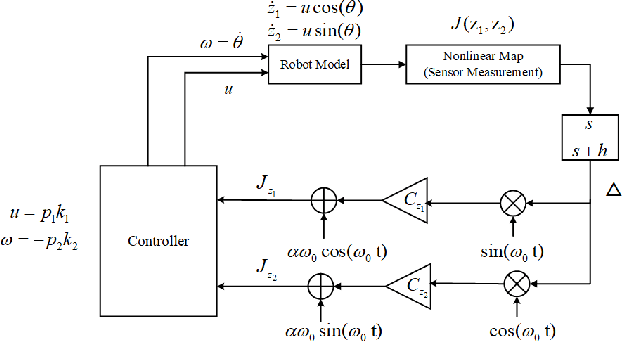
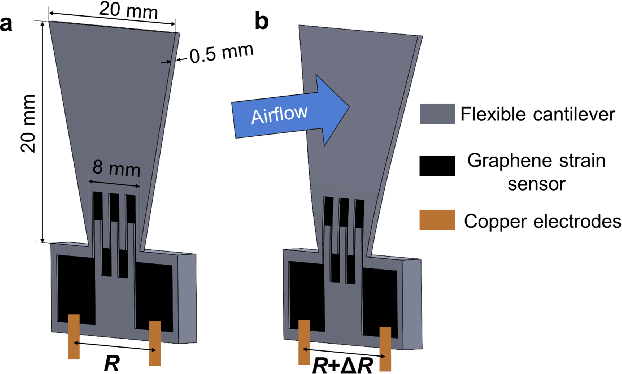
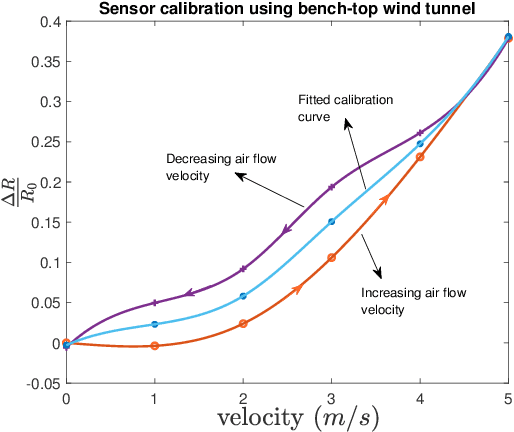
We present the design and experimental validation of source seeking control algorithms for a unicycle mobile robot that is equipped with novel 3D-printed flexible graphene-based piezoresistive airflow sensors. Based solely on a local gradient measurement from the airflow sensors, we propose and analyze a projected gradient ascent algorithm to solve the source seeking problem. In the case of partial sensor failure, we propose a combination of Extremum-Seeking Control with our projected gradient ascent algorithm. For both control laws, we prove the asymptotic convergence of the robot to the source. Numerical simulations were performed to validate the algorithms and experimental validations are presented to demonstrate the efficacy of the proposed methods.
Distributed formation control of manipulators' end-effector with internal model-based disturbance rejection
Mar 26, 2021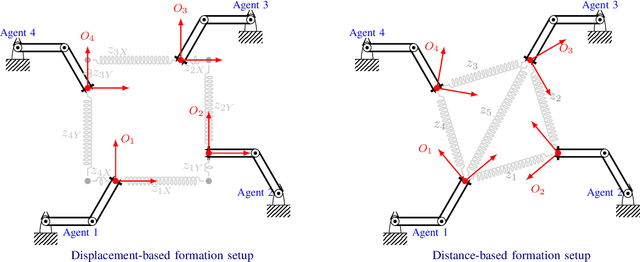

This paper addresses the problem of end-effector formation control for manipulators that are subjected to external disturbances: input disturbance torques and disturbance forces at each end-effector. The disturbances are assumed to be non-vanishing and are superposition of finite number of sinusoidal and step signals. The formation control objective is achieved by assigning virtual springs between end-effectors, by adding damping terms at joints, and by incorporating internal model-based dynamic compensators to counteract the effect of the disturbances; all of which presents a clear physical interpretation of the proposed approach. Simulation results are presented to illustrate the effectiveness of the proposed approach.
Securing Isosceles Triangular Formations under Heterogeneous Sensing and Mixed Constraints
Jan 02, 2021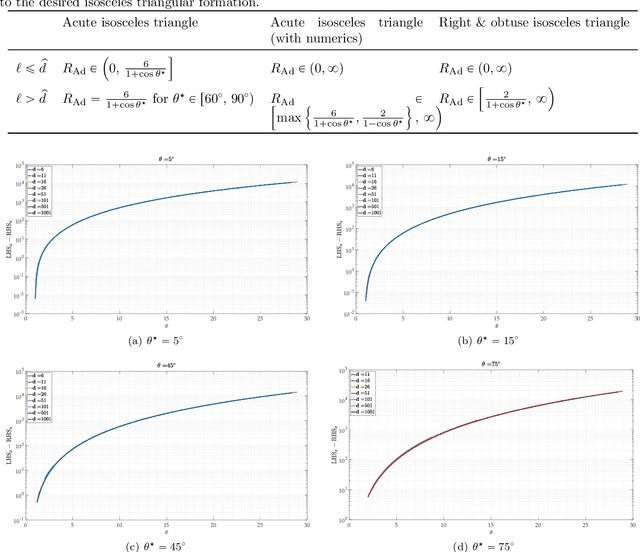
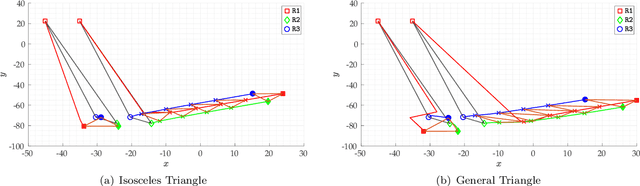
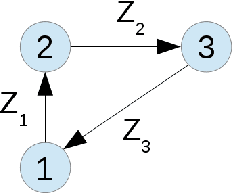
This paper focuses on securing a triangular shape (up to translation) for a team of three mobile robots that uses heterogeneous sensing mechanism. Based on the available local information, each robot employs the popular gradient-based control law to attain the assigned individual task(s). In the current work, robots are assigned either distance and signed area task(s) or bearing task(s). We provide a sufficient condition on the gain ratio $R_{\text{Ad}}$ between the signed area and the distance control term such that the desired formation shape, an isosceles triangle, is reached from all feasible starting positions. Numerical simulations are provided to support the theoretical analyses.
Angle-Constrained Formation Control for Circular Mobile Robots
May 10, 2020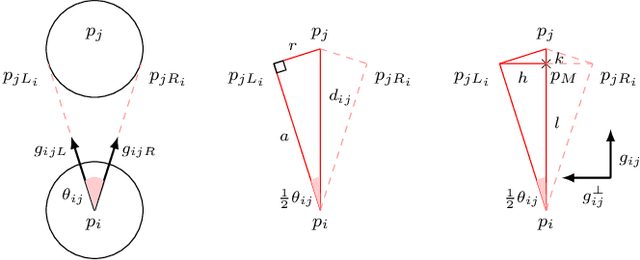
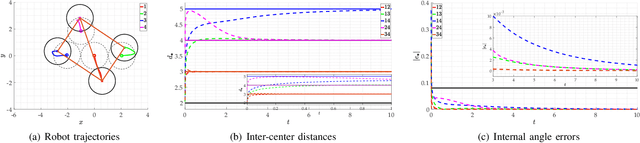
In this letter, we investigate the formation control problem of mobile robots moving in the plane where, instead of assuming robots to be simple points, each robot is assumed to have the form of a disk with equal radius. Based on interior angle measurements of the neighboring robots' disk, which can be obtained from low-cost vision sensors, we propose a gradient-based distributed control law and show the exponential convergence property of the associated error system. By construction, the proposed control law has the appealing property of ensuring collision avoidance between neighboring robots. We also present simulation results for {a team} of four circular mobile robots forming a rectangular shape.
A family of virtual contraction based controllers for tracking of flexible-joints port-Hamiltonian robots: theory and experiments
Feb 04, 2020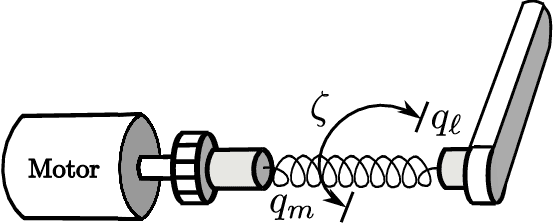
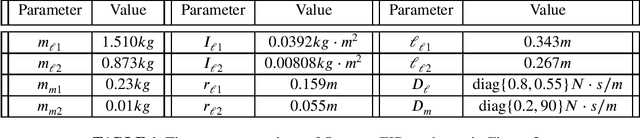
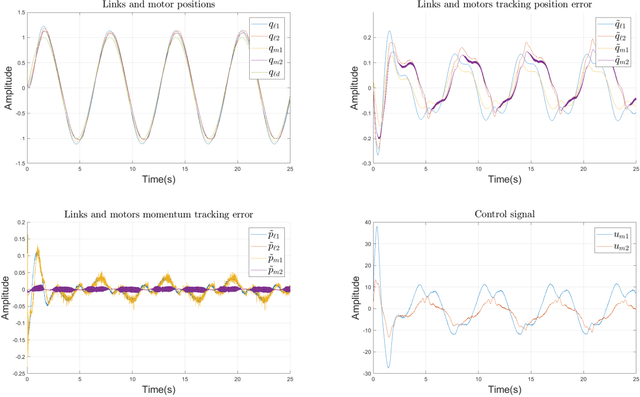
In this work we present a constructive method to design a family of virtual contraction based controllers that solve the standard trajectory tracking problem of flexible-joint robots (FJRs) in the port-Hamiltonian (pH) framework. The proposed design method, called virtual contraction based control (v-CBC), combines the concepts of virtual control systems and contraction analysis. It is shown that under potential energy matching conditions, the closed-loop virtual system is contractive and exponential convergence to a predefined trajectory is guaranteed. Moreover, the closed-loop virtual system exhibits properties such as structure preservation, differential passivity and the existence of (incrementally) passive maps.
Multi-robot motion-formation distributed control with sensor self-calibration: experimental validation
Sep 20, 2018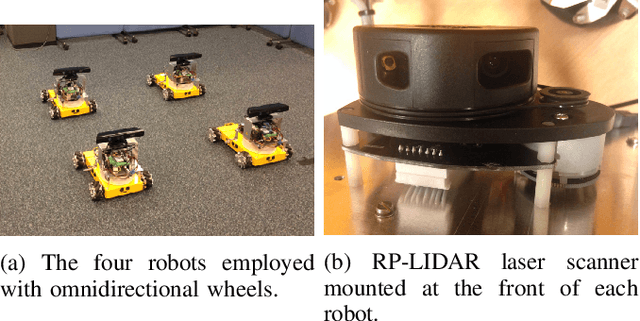
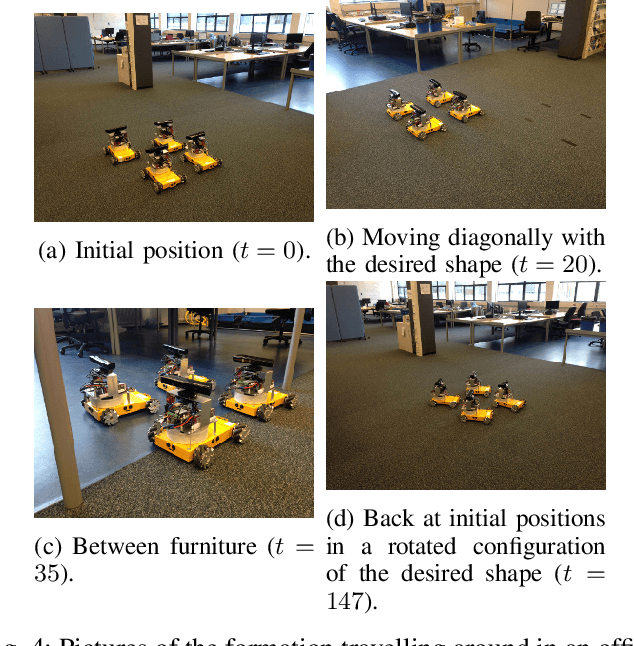
In this paper, we present the design and implementation of a robust motion formation distributed control algorithm for a team of mobile robots. The primary task for the team is to form a geometric shape, which can be freely translated and rotated at the same time. This approach makes the robots to behave as a cohesive whole, which can be useful in tasks such as collaborative transportation. The robustness of the algorithm relies on the fact that each robot employs only local measurements from a laser sensor which does not need to be off-line calibrated. Furthermore, robots do not need to exchange any information with each other. Being free of sensor calibration and not requiring a communication channel helps the scaling of the overall system to a large number of robots. In addition, since the robots do not need any off-board localization system, but require only relative positions with respect to their neighbors, it can be aimed to have a full autonomous team that operates in environments where such localization systems are not available. The computational cost of the algorithm is inexpensive and the resources from a standard microcontroller will suffice. This fact makes the usage of our approach appealing as a support for other more demanding algorithms, e.g., processing images from onboard cameras. We validate the performance of the algorithm with a team of four mobile robots equipped with low-cost commercially available laser scanners.
Taming mismatches in inter-agent distances for the formation-motion control of second-order agents
Mar 15, 2017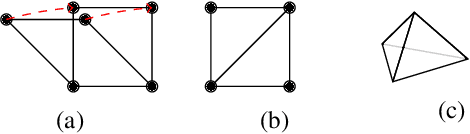
This paper presents the analysis on the influence of distance mismatches on the standard gradient-based rigid formation control for second-order agents. It is shown that, similar to the first-order case as recently discussed in the literature, these mismatches introduce two undesired group behaviors: a distorted final shape and a steady-state motion of the group formation. We show that such undesired behaviors can be eliminated by combining the standard formation control law with distributed estimators. Finally, we show how the mismatches can be effectively employed as design parameters in order to control a combined translational and rotational motion of the formation.
Distributed scaling control of rigid formations
Sep 23, 2016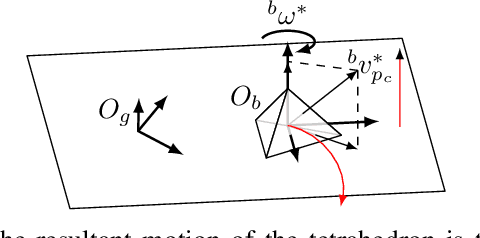
Recently it has been reported that biased range-measurements among neighboring agents in the gradient distance-based formation control can lead to predictable collective motion. In this paper we take advantage of this effect and by introducing distributed parameters to the prescribed inter-distances we are able to manipulate the steady-state motion of the formation. This manipulation is in the form of inducing simultaneously the combination of constant translational and angular velocities and a controlled scaling of the rigid formation. While the computation of the distributed parameters for the translational and angular velocities is based on the well-known graph rigidity theory, the parameters responsible for the scaling are based on some recent findings in bearing rigidity theory. We carry out the stability analysis of the modified gradient system and simulations in order to validate the main result.
Controlling rigid formations of mobile agents under inconsistent measurements
Sep 21, 2016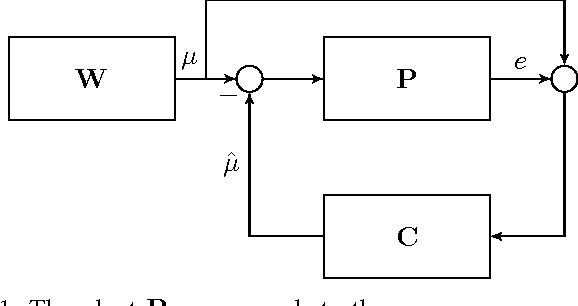
Despite the great success of using gradient-based controllers to stabilize rigid formations of autonomous agents in the past years, surprising yet intriguing undesirable collective motions have been reported recently when inconsistent measurements are used in the agents' local controllers. To make the existing gradient control robust against such measurement inconsistency, we exploit local estimators following the well known internal model principle for robust output regulation control. The new estimator-based gradient control is still distributed in nature and can be constructed systematically even when the number of agents in a rigid formation grows. We prove rigorously that the proposed control is able to guarantee exponential convergence and then demonstrate through robotic experiments and computer simulations that the reported inconsistency-induced orbits of collective movements are effectively eliminated.
* 10 pages