 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSSI-GAN: Semi-Supervised Swin-Inspired Generative Adversarial Networks for Neuronal Spike Classification
Jan 01, 2026Mosquitos are the main transmissive agents of arboviral diseases. Manual classification of their neuronal spike patterns is very labor-intensive and expensive. Most available deep learning solutions require fully labeled spike datasets and highly preprocessed neuronal signals. This reduces the feasibility of mass adoption in actual field scenarios. To address the scarcity of labeled data problems, we propose a new Generative Adversarial Network (GAN) architecture that we call the Semi-supervised Swin-Inspired GAN (SSI-GAN). The Swin-inspired, shifted-window discriminator, together with a transformer-based generator, is used to classify neuronal spike trains and, consequently, detect viral neurotropism. We use a multi-head self-attention model in a flat, window-based transformer discriminator that learns to capture sparser high-frequency spike features. Using just 1 to 3% labeled data, SSI-GAN was trained with more than 15 million spike samples collected at five-time post-infection and recording classification into Zika-infected, dengue-infected, or uninfected categories. Hyperparameters were optimized using the Bayesian Optuna framework, and performance for robustness was validated under fivefold Monte Carlo cross-validation. SSI-GAN reached 99.93% classification accuracy on the third day post-infection with only 3% labeled data. It maintained high accuracy across all stages of infection with just 1% supervision. This shows a 97-99% reduction in manual labeling effort relative to standard supervised approaches at the same performance level. The shifted-window transformer design proposed here beat all baselines by a wide margin and set new best marks in spike-based neuronal infection classification.
Functional Classification of Spiking Signal Data Using Artificial Intelligence Techniques: A Review
Sep 26, 2024



Human brain neuron activities are incredibly significant nowadays. Neuronal behavior is assessed by analyzing signal data such as electroencephalography (EEG), which can offer scientists valuable information about diseases and human-computer interaction. One of the difficulties researchers confront while evaluating these signals is the existence of large volumes of spike data. Spikes are some considerable parts of signal data that can happen as a consequence of vital biomarkers or physical issues such as electrode movements. Hence, distinguishing types of spikes is important. From this spot, the spike classification concept commences. Previously, researchers classified spikes manually. The manual classification was not precise enough as it involves extensive analysis. Consequently, Artificial Intelligence (AI) was introduced into neuroscience to assist clinicians in classifying spikes correctly. This review discusses the importance and use of AI in spike classification, focusing on the recognition of neural activity noises. The task is divided into three main components: preprocessing, classification, and evaluation. Existing methods are introduced and their importance is determined. The review also highlights the need for more efficient algorithms. The primary goal is to provide a perspective on spike classification for future research and provide a comprehensive understanding of the methodologies and issues involved. The review organizes materials in the spike classification field for future studies. In this work, numerous studies were extracted from different databases. The PRISMA-related research guidelines were then used to choose papers. Then, research studies based on spike classification using machine learning and deep learning approaches with effective preprocessing were selected.
Enhancing Cognitive Workload Classification Using Integrated LSTM Layers and CNNs for fNIRS Data Analysis
Jul 22, 2024



Functional near-infrared spectroscopy (fNIRS) is employed as a non-invasive method to monitor functional brain activation by capturing changes in the concentrations of oxygenated haemoglobin (HbO) and deoxygenated haemo-globin (HbR). Various machine learning classification techniques have been utilized to distinguish cognitive states. However, conventional machine learning methods, although simpler to implement, undergo a complex pre-processing phase before network training and demonstrate reduced accuracy due to inadequate data preprocessing. Additionally, previous research in cog-nitive load assessment using fNIRS has predominantly focused on differ-sizeentiating between two levels of mental workload. These studies mainly aim to classify low and high levels of cognitive load or distinguish between easy and difficult tasks. To address these limitations associated with conven-tional methods, this paper conducts a comprehensive exploration of the im-pact of Long Short-Term Memory (LSTM) layers on the effectiveness of Convolutional Neural Networks (CNNs) within deep learning models. This is to address the issues related to spatial features overfitting and lack of tem-poral dependencies in CNN in the previous studies. By integrating LSTM layers, the model can capture temporal dependencies in the fNIRS data, al-lowing for a more comprehensive understanding of cognitive states. The primary objective is to assess how incorporating LSTM layers enhances the performance of CNNs. The experimental results presented in this paper demonstrate that the integration of LSTM layers with Convolutional layers results in an increase in the accuracy of deep learning models from 97.40% to 97.92%.
Automated detection of Zika and dengue in Aedes aegypti using neural spiking analysis
Dec 14, 2023



Mosquito-borne diseases present considerable risks to the health of both animals and humans. Aedes aegypti mosquitoes are the primary vectors for numerous medically important viruses such as dengue, Zika, yellow fever, and chikungunya. To characterize this mosquito neural activity, it is essential to classify the generated electrical spikes. However, no open-source neural spike classification method is currently available for mosquitoes. Our work presented in this paper provides an innovative artificial intelligence-based method to classify the neural spikes in uninfected, dengue-infected, and Zika-infected mosquitoes. Aiming for outstanding performance, the method employs a fusion of normalization, feature importance, and dimension reduction for the preprocessing and combines convolutional neural network and extra gradient boosting (XGBoost) for classification. The method uses the electrical spiking activity data of mosquito neurons recorded by microelectrode array technology. We used data from 0, 1, 2, 3, and 7 days post-infection, containing over 15 million samples, to analyze the method's performance. The performance of the proposed method was evaluated using accuracy, precision, recall, and the F1 scores. The results obtained from the method highlight its remarkable performance in differentiating infected vs uninfected mosquito samples, achieving an average of 98.1%. The performance was also compared with 6 other machine learning algorithms to further assess the method's capability. The method outperformed all other machine learning algorithms' performance. Overall, this research serves as an efficient method to classify the neural spikes of Aedes aegypti mosquitoes and can assist in unraveling the complex interactions between pathogens and mosquitoes.
Manipulating Soft Tissues by Deep Reinforcement Learning for Autonomous Robotic Surgery
Feb 14, 2019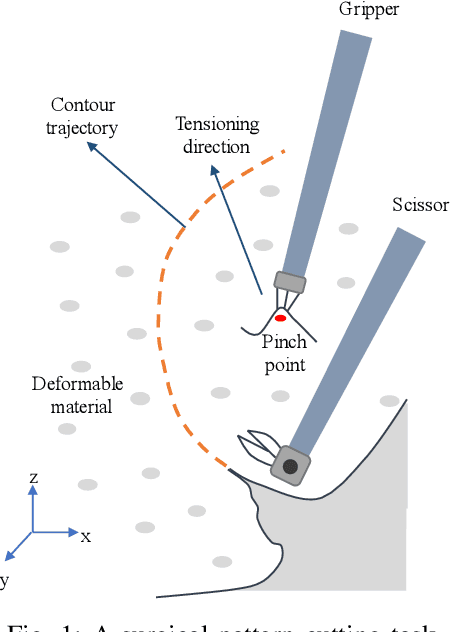
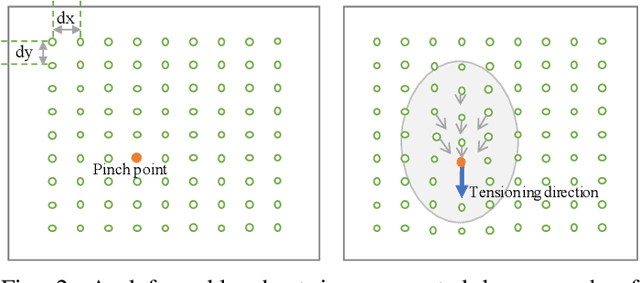
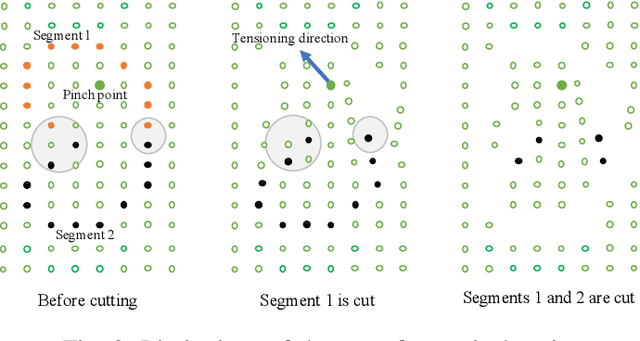
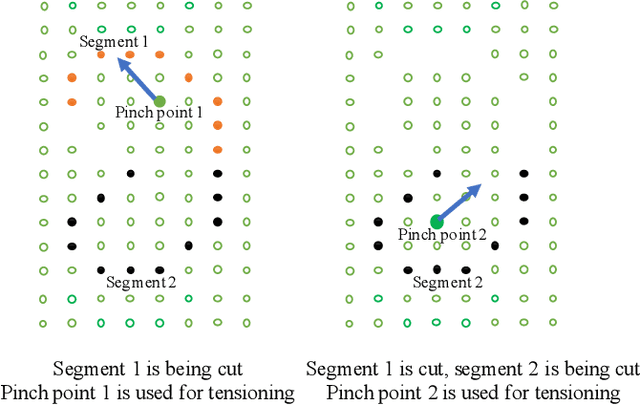
In robotic surgery, pattern cutting through a deformable material is a challenging research field. The cutting procedure requires a robot to concurrently manipulate a scissor and a gripper to cut through a predefined contour trajectory on the deformable sheet. The gripper ensures the cutting accuracy by nailing a point on the sheet and continuously tensioning the pinch point to different directions while the scissor is in action. The goal is to find a pinch point and a corresponding tensioning policy to minimize damage to the material and increase cutting accuracy measured by the symmetric difference between the predefined contour and the cut contour. Previous study considers finding one fixed pinch point during the course of cutting, which is inaccurate and unsafe when the contour trajectory is complex. In this paper, we examine the soft tissue cutting task by using multiple pinch points, which imitates human operations while cutting. This approach, however, does not require the use of a multi-gripper robot. We use a deep reinforcement learning algorithm to find an optimal tensioning policy of a pinch point. Simulation results show that the multi-point approach outperforms the state-of-the-art method in soft pattern cutting task with respect to both accuracy and reliability.