 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModified Smith predictor for unstable linear systems
Jul 29, 2025The paper presents a new control algorithm for unstable linear systems with input delay. In comparison with known analogues, the control law has been designed, which is a modification of the Smith predictor, and is the simplest one to implement without requiring complex integration methods. At the same time, the problem of stabilization of a closed system is effectively solved, ensuring the boundedness of all state variables and the exponential stability of the equilibrium point.
An Adaptive Observer for Uncertain Linear Time-Varying Systems with Unknown Additive Perturbations
Dec 10, 2021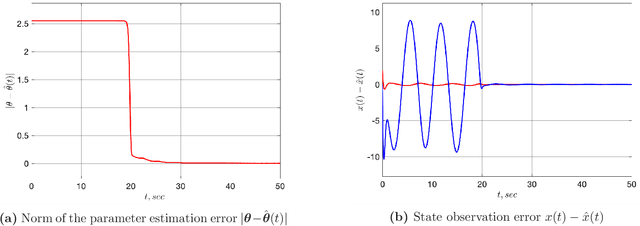
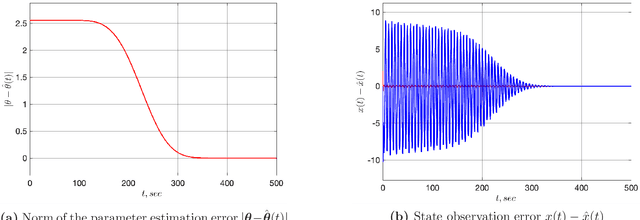
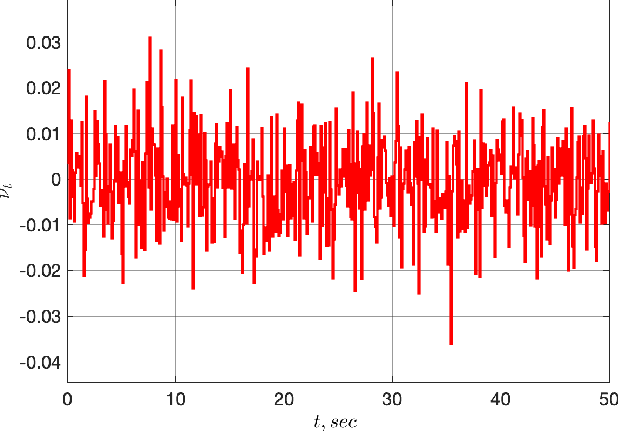
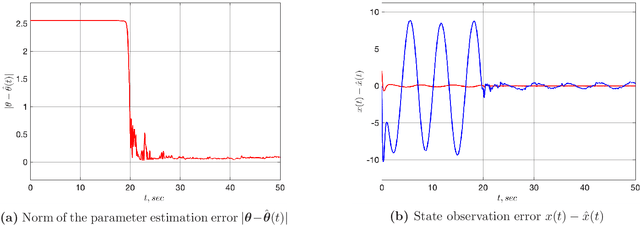
In this paper we are interested in the problem of adaptive state observation of linear time-varying (LTV) systems where the system and the input matrices depend on unknown time-varying parameters. It is assumed that these parameters satisfy some known LTV dynamics, but with unknown initial conditions. Moreover, the state equation is perturbed by an additive signal generated from an exosystem with uncertain constant parameters. Our main contribution is to propose a globally convergent state observer that requires only a weak excitation assumption on the system.