 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision-Aware Evaluation of Physics-Informed Surrogates
Jun 05, 2026Physics-informed machine learning is often assessed by curve error, although engineering use depends on downstream decisions: ranking candidates, avoiding infeasible designs and limiting regret. We introduce pinn-gym, an open benchmark for material-conditioned lattice design that couples a transparent reduced-order crush-and-impact oracle with five printable polymer cards, dimensionless force-response targets and a protocol spanning curve fidelity, physical admissibility, top-k retrieval and mass regret. Across per-material, pooled and cross-material settings, low nRMSE is frequently insufficient to identify useful design selections. Physics-informed losses alter trade-offs rather than monotonically improving all metrics, and dimensionless conditioning improves comparability without making transfer symmetric. The benchmark is not a certified material model; within the released oracle, candidate generator and material cards, pinn-gym provides a reproducible testbed for evaluating PIML surrogates as decision systems rather than curve predictors alone.
Closer Look at the Uncertainty Estimation in Semantic Segmentation under Distributional Shift
May 31, 2021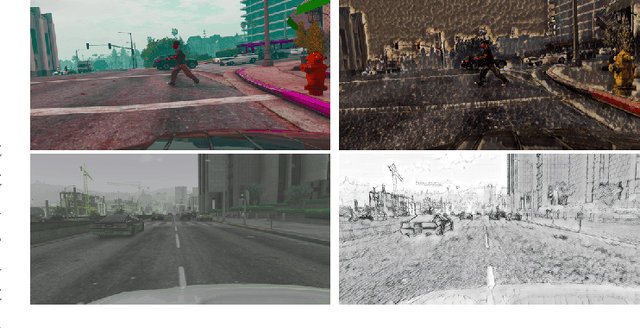
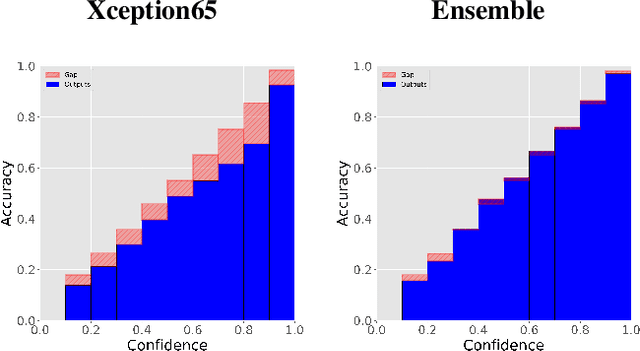
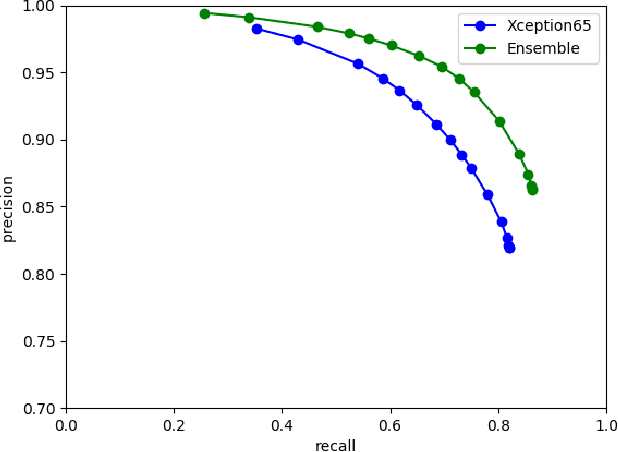
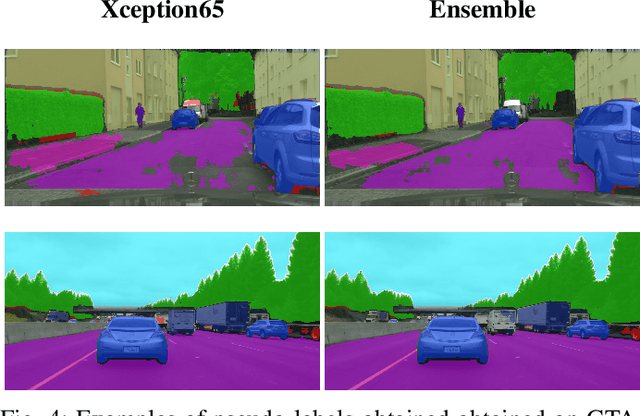
While recent computer vision algorithms achieve impressive performance on many benchmarks, they lack robustness - presented with an image from a different distribution, (e.g. weather or lighting conditions not considered during training), they may produce an erroneous prediction. Therefore, it is desired that such a model will be able to reliably predict its confidence measure. In this work, uncertainty estimation for the task of semantic segmentation is evaluated under a varying level of domain shift: in a cross-dataset setting and when adapting a model trained on data from the simulation. It was shown that simple color transformations already provide a strong baseline, comparable to using more sophisticated style-transfer data augmentation. Further, by constructing an ensemble consisting of models using different backbones and/or augmentation methods, it was possible to improve significantly model performance in terms of overall accuracy and uncertainty estimation under the domain shift setting. The Expected Calibration Error (ECE) on challenging GTA to Cityscapes adaptation was reduced from 4.05 to the competitive value of 1.1. Further, an ensemble of models was utilized in the self-training setting to improve the pseudo-labels generation, which resulted in a significant gain in the final model accuracy, compared to the standard fine-tuning (without ensemble).