 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Using Neural Networks to Learn Safety Speed Reduction in Human-Robot Collaboration: A Comparative Analysis
Dec 19, 2025



In Human-Robot Collaboration, safety mechanisms such as Speed and Separation Monitoring and Power and Force Limitation dynamically adjust the robot's speed based on human proximity. While essential for risk reduction, these mechanisms introduce slowdowns that makes cycle time estimation a hard task and impact job scheduling efficiency. Existing methods for estimating cycle times or designing schedulers often rely on predefined safety models, which may not accurately reflect real-world safety implementations, as these depend on case-specific risk assessments. In this paper, we propose a deep learning approach to predict the robot's safety scaling factor directly from process execution data. We analyze multiple neural network architectures and demonstrate that a simple feed-forward network effectively estimates the robot's slowdown. This capability is crucial for improving cycle time predictions and designing more effective scheduling algorithms in collaborative robotic environments.
dPMP-Deep Probabilistic Motion Planning: A use case in Strawberry Picking Robot
Aug 18, 2022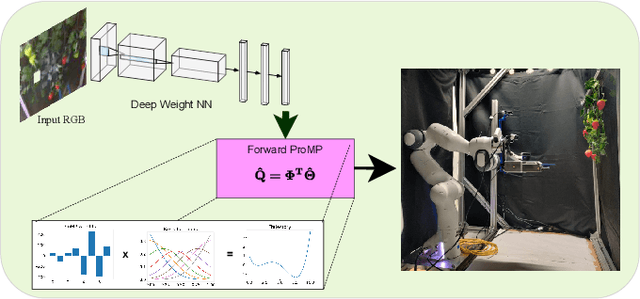
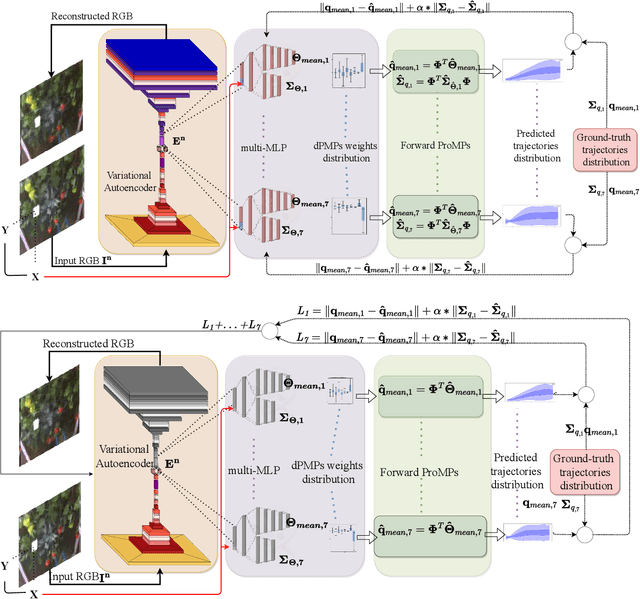
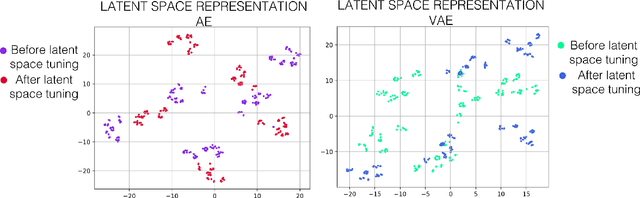
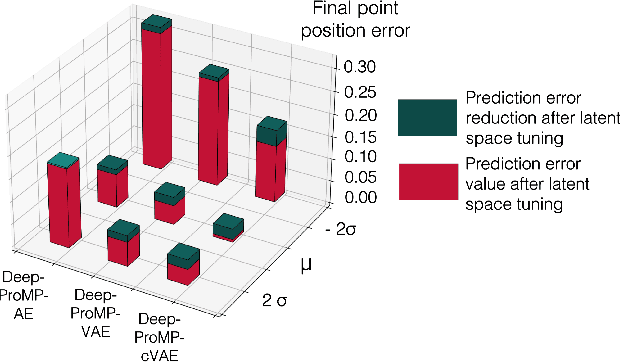
This paper presents a novel probabilistic approach to deep robot learning from demonstrations (LfD). Deep movement primitives (DMPs) are deterministic LfD model that maps visual information directly into a robot trajectory. This paper extends DMPs and presents a deep probabilistic model that maps the visual information into a distribution of effective robot trajectories. The architecture that leads to the highest level of trajectory accuracy is presented and compared with the existing methods. Moreover, this paper introduces a novel training method for learning domain-specific latent features. We show the superiority of the proposed probabilistic approach and novel latent space learning in the lab's real-robot task of strawberry harvesting. The experimental results demonstrate that latent space learning can significantly improve model prediction performances. The proposed approach allows to sample trajectories from distribution and optimises the robot trajectory to meet a secondary objective, e.g. collision avoidance.