 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRankLLM: A Python Package for Reranking with LLMs
May 25, 2025
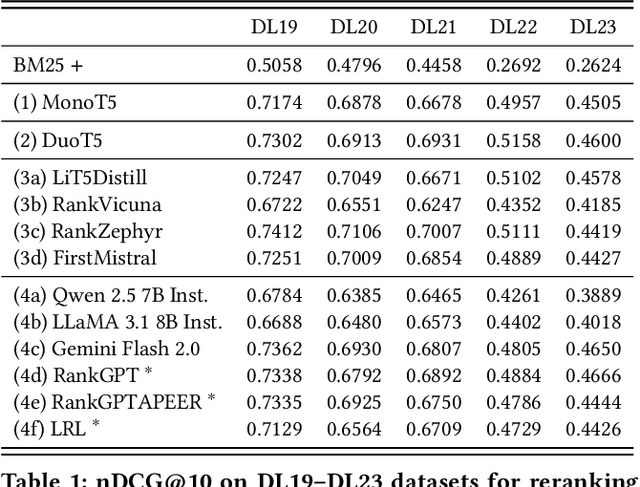


The adoption of large language models (LLMs) as rerankers in multi-stage retrieval systems has gained significant traction in academia and industry. These models refine a candidate list of retrieved documents, often through carefully designed prompts, and are typically used in applications built on retrieval-augmented generation (RAG). This paper introduces RankLLM, an open-source Python package for reranking that is modular, highly configurable, and supports both proprietary and open-source LLMs in customized reranking workflows. To improve usability, RankLLM features optional integration with Pyserini for retrieval and provides integrated evaluation for multi-stage pipelines. Additionally, RankLLM includes a module for detailed analysis of input prompts and LLM responses, addressing reliability concerns with LLM APIs and non-deterministic behavior in Mixture-of-Experts (MoE) models. This paper presents the architecture of RankLLM, along with a detailed step-by-step guide and sample code. We reproduce results from RankGPT, LRL, RankVicuna, RankZephyr, and other recent models. RankLLM integrates with common inference frameworks and a wide range of LLMs. This compatibility allows for quick reproduction of reported results, helping to speed up both research and real-world applications. The complete repository is available at rankllm.ai, and the package can be installed via PyPI.
Fast and Modular Autonomy Software for Autonomous Racing Vehicles
Aug 27, 2024



Autonomous motorsports aim to replicate the human racecar driver with software and sensors. As in traditional motorsports, Autonomous Racing Vehicles (ARVs) are pushed to their handling limits in multi-agent scenarios at extremely high ($\geq 150mph$) speeds. This Operational Design Domain (ODD) presents unique challenges across the autonomy stack. The Indy Autonomous Challenge (IAC) is an international competition aiming to advance autonomous vehicle development through ARV competitions. While far from challenging what a human racecar driver can do, the IAC is pushing the state of the art by facilitating full-sized ARV competitions. This paper details the MIT-Pitt-RW Team's approach to autonomous racing in the IAC. In this work, we present our modular and fast approach to agent detection, motion planning and controls to create an autonomy stack. We also provide analysis of the performance of the software stack in single and multi-agent scenarios for rapid deployment in a fast-paced competition environment. We also cover what did and did not work when deployed on a physical system the Dallara AV-21 platform and potential improvements to address these shortcomings. Finally, we convey lessons learned and discuss limitations and future directions for improvement.
* Published in Journal of Field Robotics