 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust and Context-Aware Real-Time Collaborative Robot Handling via Dynamic Gesture Commands
Apr 12, 2023This paper studies real-time collaborative robot (cobot) handling, where the cobot maneuvers an object under human dynamic gesture commands. Enabling dynamic gesture commands is useful when the human needs to avoid direct contact with the robot or the object handled by the robot. However, the key challenge lies in the heterogeneity in human behaviors and the stochasticity in the perception of dynamic gestures, which requires the robot handling policy to be adaptable and robust. To address these challenges, we introduce Conditional Collaborative Handling Process (CCHP) to encode a contextaware cobot handling policy and a procedure to learn such policy from human-human collaboration. We thoroughly evaluate the adaptability and robustness of CCHP and apply our approach to a real-time cobot assembly task with Kinova Gen3 robot arm. Results show that our method leads to significantly less human effort and smoother human-robot collaboration than state-of-the-art rule-based approach even with first-time users.
Learning from Physical Human Feedback: An Object-Centric One-Shot Adaptation Method
Mar 09, 2022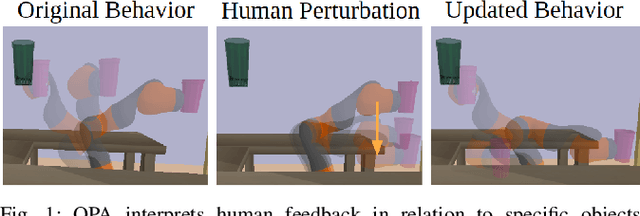
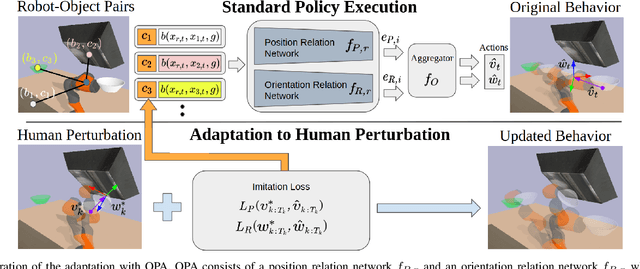
For robots to be effectively deployed in novel environments and tasks, they must be able to understand the feedback expressed by humans during intervention. This can either correct undesirable behavior or indicate additional preferences. Existing methods either require repeated episodes of interactions or assume prior known reward features, which is data-inefficient and can hardly transfer to new tasks. We relax these assumptions by describing human tasks in terms of object-centric sub-tasks and interpreting physical interventions in relation to specific objects. Our method, Object Preference Adaptation (OPA), is composed of two key stages: 1) pre-training a base policy to produce a wide variety of behaviors, and 2) online-updating only certain weights in the model according to human feedback. The key to our fast, yet simple adaptation is that general interaction dynamics between agents and objects are fixed, and only object-specific preferences are updated. Our adaptation occurs online, requires only one human intervention (one-shot), and produces new behaviors never seen during training. Trained on cheap synthetic data instead of expensive human demonstrations, our policy demonstrates impressive adaptation to human perturbations on challenging, realistic tasks in our user study. Videos, code, and supplementary material provided.
Learn from Human Teams: a Probabilistic Solution to Real-Time Collaborative Robot Handling with Dynamic Gesture Commands
Dec 11, 2021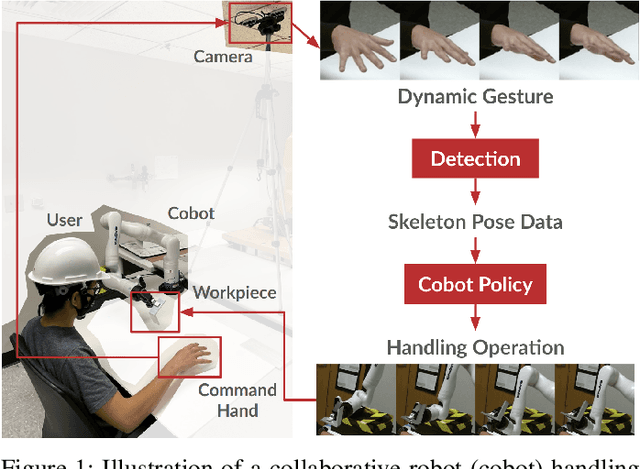
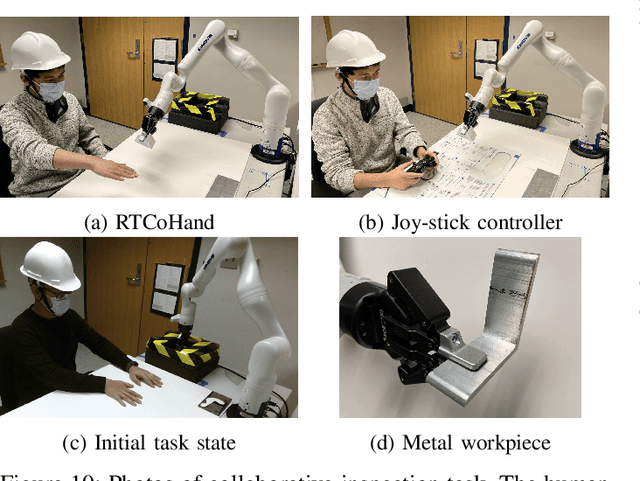
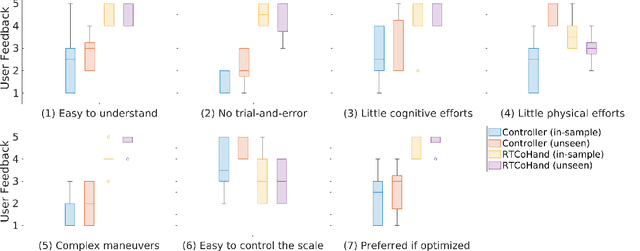
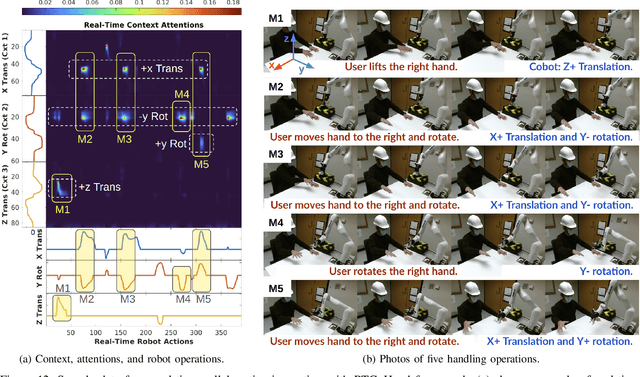
We study real-time collaborative robot (cobot) handling, where the cobot maneuvers a workpiece under human commands. This is useful when it is risky for humans to directly handle the workpiece. However, it is hard to make the cobot both easy to command and flexible in possible operations. In this work, we propose a Real-Time Collaborative Robot Handling (RTCoHand) framework that allows the control of cobot via user-customized dynamic gestures. This is hard due to variations among users, human motion uncertainties, and noisy human input. We model the task as a probabilistic generative process, referred to as Conditional Collaborative Handling Process (CCHP), and learn from human-human collaboration. We thoroughly evaluate the adaptability and robustness of CCHP and apply our approach to a real-time cobot handling task with Kinova Gen3 robot arm. We achieve seamless human-robot collaboration with both experienced and new users. Compared to classical controllers, RTCoHand allows significantly more complex maneuvers and lower user cognitive burden. It also eliminates the need for trial-and-error, rendering it advantageous in safety-critical tasks.