 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrugal random exploration strategy for shape recognition using statistical geometry
Aug 09, 2023Very distinct strategies can be deployed to recognize and characterize an unknown environment or a shape. A recent and promising approach, especially in robotics, is to reduce the complexity of the exploratory units to a minimum. Here, we show that this frugal strategy can be taken to the extreme by exploiting the power of statistical geometry and introducing new invariant features. We show that an elementary robot devoid of any orientation or observation system, exploring randomly, can access global information about an environment such as the values of the explored area and perimeter. The explored shapes are of arbitrary geometry and may even non-connected. From a dictionary, this most simple robot can thus identify various shapes such as famous monuments and even read a text.
Classifying Cycling Hazards in Egocentric Data
Mar 15, 2021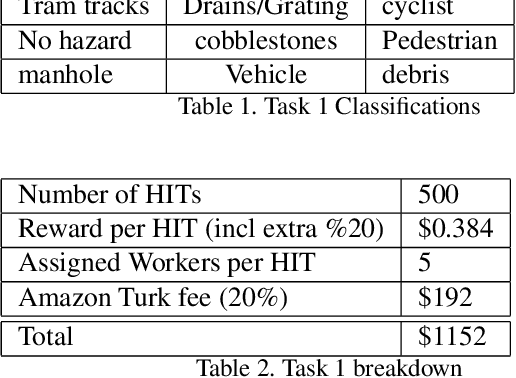
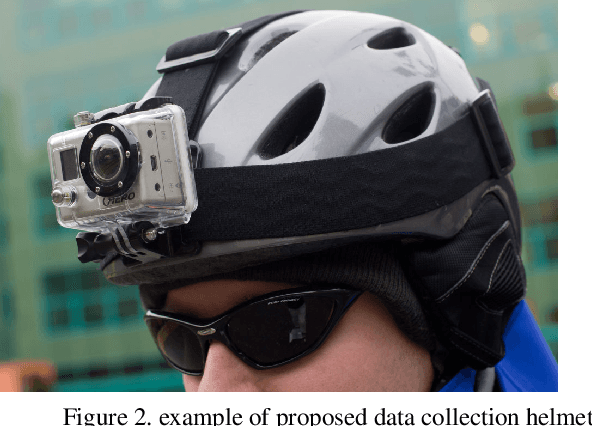
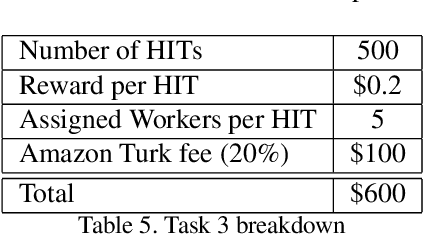
This proposal is for the creation and annotation of an egocentric video data set of hazardous cycling situations. The resulting data set will facilitate projects to improve the safety and experience of cyclists. Since cyclists are highly sensitive to road surface conditions and hazards they require more detail about road conditions when navigating their route. Features such as tram tracks, cobblestones, gratings, and utility access points can pose hazards or uncomfortable riding conditions for their journeys. Possible uses for the data set are identifying existing hazards in cycling infrastructure for municipal authorities, real time hazard and surface condition warnings for cyclists, and the identification of conditions that cause cyclists to make sudden changes in their immediate route.